AKI-H8(3048)傪巊偭偨愒奜慄儕儌僐儞偺夝愅2
HEW傪奐敪娐嫬偲偟偰巊梡
愒奜慄儕儌僐儞怣崋夝愅僙僢僩偺惢嶌
AKI-H8/3048F儅僀僐儞儃乕僪傪巊偭偨愒奜慄儕儌僐儞偺夝愅僾儘僌儔儉偼埲慜偵傕堦搙嶌傝傑偟偨丅
[AKI-H8(3048)傪巊偭偨愒奜慄儕儌僐儞偺夝愅]
偟偐偟丄偙傟偑彮乆晄曋偱偁傞偨傔愱梡婡偲偟偰嶌惉偟側偍偦偆偲巚偄棫偪傑偟偨丅側偤晄曋側偺偐偲尵偆偲丄
AKI-H8儅僓乕儃乕僪偼帪乆傎偐偺梡搑偱巊梡偡傞偙偲偑偁傞偨傔僾儘僌儔儉傪彂偒姺偊傞偙偲偑偁傞偨傔偱偡丅
梡搑偛偲偵堦乆彂偒姺偊傪峴偆偙偲傕堄奜偵柺搢偱偡偟丄彮偟庤捈偟偟傛偆偲巚偭偰傕埲慜偺奐敪娐嫬傪巚偄
弌偡偲偙傠偐傜偼偠傔側偗傟偽側傜側偄偺傕乮嵟嬤偱偼HEW(Renesas弮惓偺奐敪娐嫬)傪巊梡偡傞偙偲偑懡偄偺偱乯
巚偭偨傛傝傕庤娫偑偐偐傝傑偡丅
崱夞偼丄AKI-H8儅僓乕儃乕僪偺儈僯乮弅彫乯斉傪帺嶌偟偰丄偦偺儅僓乕儃乕僪忋偵AKI-H8/3048儅僀僐儞儃乕僪傪 幚憰偡傞宍偱愱梡婡傪嶌傝傑偟偨丅嵟嬤偼AKI-H8/3052傪儊僀儞偲偟偰巊偆偙偲偑懡偄偺偱丄AKI-H8/3048偼梋偭偰偄傑偟偨丅 傑偨丄偙偺AKI-H8/3048偑愯桳偟偰偄偨AKI亅H8儅僓乕儃乕僪偑堦枃嬻偒傑偡丅梋偭偰偄偨偨AKI-H8/3048傪桳岠妶梡偡傞 偙偲偑偱偒傞忋偵嬻偄偨儅僓乕儃乕僪傕傑偨丄AKI-H8/3052梡偵夵憿偡傞偙偲偑偱偒偰偙傟傕桳岠妶梡偱偒傑偡丅
慜夞偼廐寧揹巕條偺僐儞僷僀儔傗儕儞僇傪巊偭偰奐敪偟偨偺偱偡偑丄崱夞偼Renesas弮惓偺HEW傪巊偭偰奐敪偟傑偟偨丅
傑偨丄慜夞傛傝傕帪娫寁應偺暘夝擻傪忋偘傞偲偲傕偵丄僷僜僐儞偐傜偺巜帵偵傛偭偰寁應偺奐巒丒僨乕僞偺揮憲側偳偑
偱偒傞傛偆偵偟傑偟偨丅
愒奜慄儕儌僐儞偺怣崋偵偮偄偰
愒奜慄儕儌僐儞偲偼丄僥儗價傗僄傾僐儞丄僗僥儗僆側偳傪峸擖偡傞偲偮偄偰偔傞堦斒揑側儕儌僐儞偺偙偲偱偡丅
婡婍傪墦妘憖嶌偡傞偨傔偵愒奜慄怣崋傪棙梡偟偰摦嶌巜帵偺怣崋傪憲庴怣偡傞偙偲偐傜愒奜慄儕儌僐儞偲屇偽傟偰偄傑偡丅
偙偙偱偼愒奜慄怣崋偵偮偄偰偺娙扨側愢柧傪偟傑偡丅愒奜慄儕儌僐儞偺僨乕僞憲怣丒庴怣偺巇慻傒傗僼僅乕儅僢僩 側偳偵偮偄偰徻偟偔抦傝偨偄曽偼丄傛傝徻偟偔愢柧偟偰偄傞僒僀僩偑悢懡偔懚嵼偟傑偡偺偱偦偪傜傪専嶕偟偰嶲徠 偟偰偔偩偝偄丅
儅僀僐儞偐傜尒傞儕儌僐儞怣崋
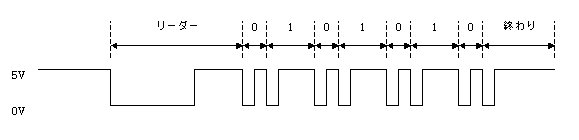
恾侾丏庴岝儌僕儏乕儖偺弌椡
愒奜慄儕儌僐儞怣崋傪庴怣偡傞応崌丄堦斒揑偵愒奜慄儕儌僐儞梡偺庴岝儌僕儏乕儖傪巊梡偟傑偡丅庴岝儌僕儏乕儖偵傛偭偰 庴怣偝傟偨怣崋偼恾侾偺傛偆側攇宍偱弌椡偝傟傑偡丅愒奜慄儕儌僐儞偺僨乕僞憲怣僼僅乕儅僢僩偵偼偄偔偮偐偺婯奿偑懚嵼偟傑偡丅庡側傕偺偲偟偰偼NEC僼僅乕儅僢僩丄壠揹惢昳嫤夛 僼僅乕儅僢僩丄SONY僼僅乕儅僢僩側偳偑偁傝傑偡偑丄偙傟傜埲奜偵傕撈帺偺婯奿傪巊梡偟偰偄傞儊乕僇乕傕懚嵼偟偰偄傑偡丅
彯丄恾侾偼曋媂忋揔摉偵彂偄偨傕偺側偺偱丄摿掕偺僼僅乕儅僢僩偵婎偯偄偰偼偄傑偣傫丅
恾侾偺攇宍傪娙扨偵愢柧偟傑偡丅
- 怣崋偑侽V偵側偭偰偄傞婜娫偑愒奜慄偑徠幩偝傟偰偄傞婜娫偱偡丅偮傑傝丄儕儌僐儞偺愒奜慄LED偑揰摂偟偰偄傞婜娫傪 帵偟傑偡丅(揰摂偲偄偭偰傕幚偼38kHz乮40kHz乯偱僆儞丒僆僼傪孞傝曉偟偰偄傑偡丅庴岝儌僕儏乕儖偺弌椡偐傜偼尒偊側偄傛偆偵側偭 偰偄傑偡丅)丅偙偺婜娫傪僆儞婜娫偲屇傇偙偲偵偟傑偡丅
- 怣崋偑俆V偵側偭偰偄傞婜娫偑愒奜慄偑徠幩偝傟偰偄側偄婜娫偱偡丅儕儌僐儞偺愒奜慄LED偑徚摂偟偰偄傞婜娫傪 帵偟傑偡丅偙偺婜娫偺偙偲傪僆僼婜娫偲屇傇偙偲偵偟傑偡丅
- 嵟弶偵儕乕僟丒僐乕僪偑憲怣偝傟偰偒傑偡丅偙偺儕乕僟丒僐乕僪偵傛偭偰偙傟偐傜僨乕僞偑憲傜傟偰偔傞偙偲傪 抦傜偣傑偡丅
- 僆儞婜娫偲僆僼婜娫傪崌傢偣偨帪娫偱傂偲偮偺價僢僩僨乕僞偑昞尰偝傟傑偡丅恾侾偱偼帪娫偑抁偄応崌傪乭侽乭丄 挿偄応崌傪乭侾乭偲偟偰偄傑偡丅
- 恾侾偱偼僆僼婜娫偺挿偝傪曄偊偰榑棟抣傪昞尰偟偰偄傑偡偑丄婯奿偵傛偭偰偼僆儞婜娫偺挿偝傪曄偊偰榑棟抣傪 昞尰偡傞偙偲傕偁傝傑偡丅
怣崋夝愅偺偨傔偵
枹抦偺儕儌僐儞怣崋傪夝愅偡傞偵偼恾1偱帵偟偨傛偆側儕儌僐儞怣崋傪夝愅偡傞偙偲偵側傝傑偡丅偙傟偼偮傑傝丄 儕乕僟僐乕僪傗榑棟抣偺僆儞婜娫丒僆僼婜娫偺帪娫傪寁應偟偰偦偺摿挜傪専摙偡傞偙偲偵側傝傑偡丅 摿掕偺婯奿偺摿挜偑傢偐偭偰偄傟偽偦偺婯奿偲堦抳偡傞偐偳偆偐傕傢偐傞傛偆偵側傝傑偡丅
愒奜慄儕儌僐儞怣崋夝愅僙僢僩
奣梫
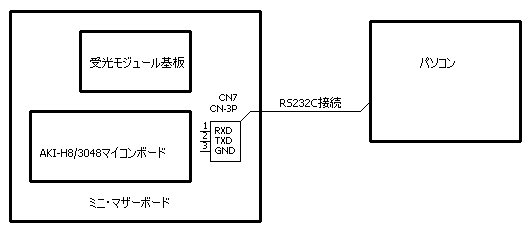
恾俀丏愒奜慄儕儌僐儞怣崋夝愅僙僢僩僽儘僢僋恾
惢嶌偟偨愒奜慄儕儌僐儞怣崋夝愅僙僢僩偺僽儘僢僋恾傪恾2偵帵偟傑偡丅庴岝儌僕儏乕儖婎斅忋偺庴岝儌僕儏乕儖偱儕儌僐儞怣崋傪 庴怣偟丄偦偺怣崋偺僆儞婜娫丒僆僼婜娫傪AKI-H8/3048偱寁應丒曐懚偟傑偡丅 曐懚偟偨僨乕僞偼RS232C愙懕偱僷僜僐儞偵揮憲偡傞偙偲偑偱偒傑偡丅 寁應丒僨乕僞揮憲偺巜帵偼儈僯丒儅僓乕儃乕僪忋偺僗僀僢僠偐丄僷僜僐儞偐傜偺怣崋偱峴偄傑偡丅夞楬恾
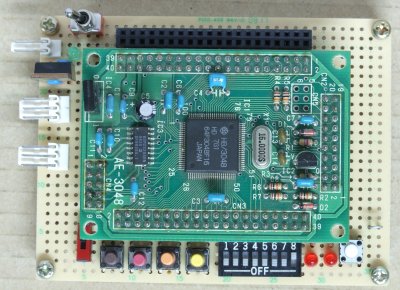
夞楬恾傪埲壓偵帵偟傑偡丅傎偲傫偳偑儈僯丒儅僓乕儃乕僪偺夞楬恾偱偡丅 愒奜慄怣崋傪庴怣偡傞晹暘偼IC堦屄偩偗傪忔偣偨庴岝儌僕儏乕儖婎斅偺夞楬偩偗偱偡丅
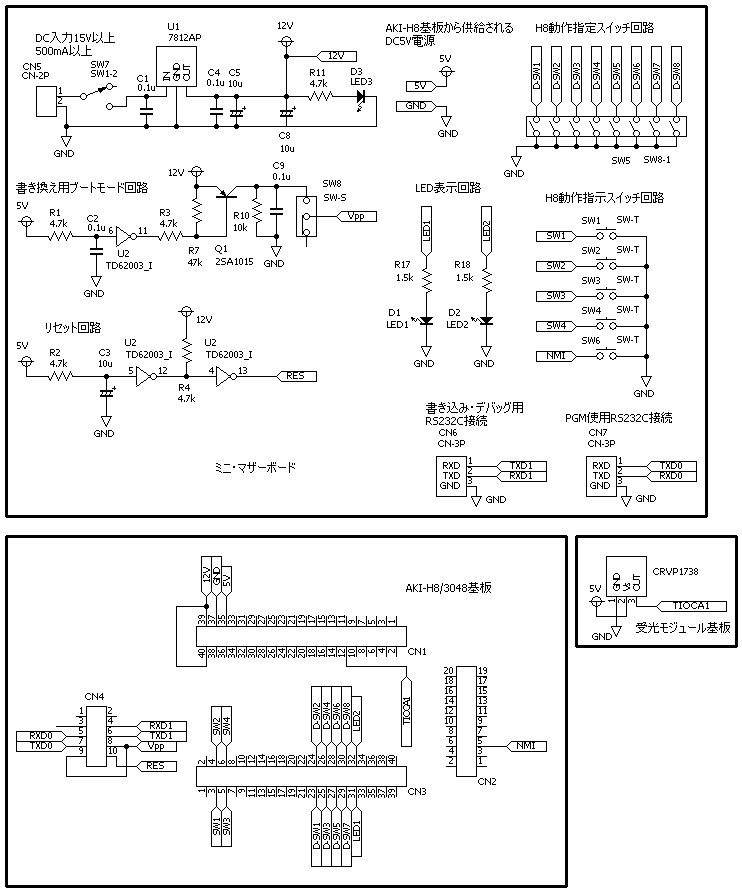
恾俁丏夞楬恾
| 儈僯丒儅僓乕儃乕僪 | 彂偒崬傒夞楬丄僗僀僢僠丄LED丄RS232C側偳丄廐寧揹巕條偺AKI-H8儅僀僐儞愱梡儅僓乕儃乕僪偲傎傏摨偠
僺儞愙懕丒夞楬偵側偭偰偄傑偡乮LCD愙懕偼偁傝傑偣傫乯丅
儈僯丒儅僓乕儃乕僪忋偺僗僀僢僠傪憖嶌偡傞偙偲偵傛偭偰儌乕僪偺愝掕丒摦嶌偺巜帵傪峴偄傑偡丅 |
| 庴岝儌僕儏乕儖婎斅 | 庴岝儌僕儏乕儖偑忔偭偰偄傞婎斅丅庴怣偟偨儕儌僐儞怣崋傪AKI-H8/3048儅僀僐儞婎斅偵嫙媼偟傑偡丅 庴岝儌僕儏乕儖偩偗偺旕忢偵僔儞僾儖側夞楬偱偡丅 |
| AKI-H8/3048儅僀僐儞婎斅 | 廐寧揹巕條偺儅僀僐儞儃乕僪丅怣崋偺寁應丒曐懚丄僨乕僞偺憲怣側偳傪峴偄傑偡丅 夞楬恾偱偼怣崋偺愙懕偩偗傪昞尰偟偰偄傑偡丅 |
| 僷僜僐儞 | RS232C愙懕偱儈僯丒儅僓乕儃乕僪偲愙懕偟偰丄曐懚偟偨僨乕僞傪庴怣丄摦嶌偺巜帵側偳傪峴偄傑偡丅 僷僜僐儞忋偺僜僼僩偼僴僀僷乕僞乕儈僫儖偐摨摍偺僞乕儈僫儖僜僼僩偱峴偆偙偲偑偱偒傑偡丅 |
 |
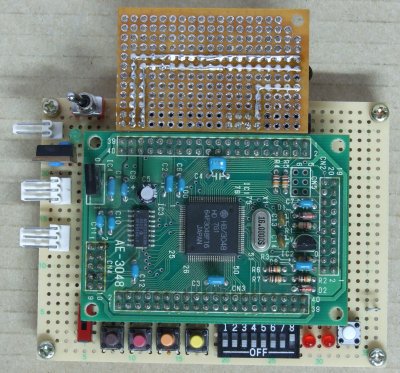 |
| 儈僯丒儅僓乕儃乕僪 | 儈僯丒儅僓乕儃乕僪亄庴岝儌僕儏乕儖婎斅 |
H8/3048F偺僜僼僩僂僃傾
奐敪娐嫬
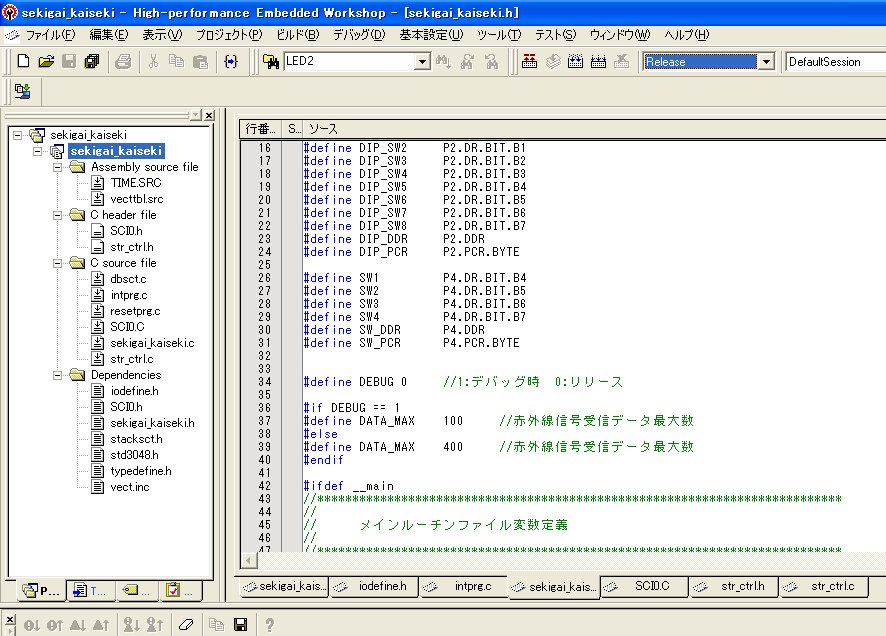
HEW乮High-Performance Embedded Workshop乯偲儌僯僞僨僶僢僈傪巊梡偟偰奐敪偟傑偟偨丅H8/3048F梡偺儌僯僞僨僶僢僈偵偮偄偰偼 H8/3048F儌乕僪俈梡儌僯僞僨僶僢僈惗惉儊儌傪嶲徠偟偰偔偩偝偄丅
崱夞嶌惉偟偨C尵岅僜乕僗僐乕僪傪娷傓HEW偺儚乕僋僗儁乕僗偱偡丅
摦嶌儌乕僪
憖嶌曽朄偵傛偭偰摦嶌儌乕僪傪擇偮偵暘偗傑偟偨丅 儌乕僪偺愗傝懼偊偼僨傿僢僾僗僀僢僠偺8斣偵傛偭偰峴偄傑偡丅婲摦帪偵8斣僗僀僢僠偑僆僼側傜僗僀僢僠儌乕僪丅 僆儞側傜捠怣儌乕僪偱摦嶌偟傑偡丅| 摦嶌儌乕僪 | 憖嶌曽朄 | 僨傿僢僾僗僀僢僠俉 |
| 僗僀僢僠儌乕僪 | 儈僯丒儅僓乕儃乕僪忋偺僗僀僢僠憖嶌偵廬偭偰摦嶌偡傞丅 | 僆僼 |
| 捠怣儌乕僪 | RS232C愙懕偺僷僜僐儞偐傜憲傜傟偰偔傞僐儅儞僪偵廬偭偰摦嶌偡傞丅 | 僆儞 |
摦嶌偺巜帵
摦嶌偺巜帵曽朄偼埲壓偺傛偆偵側偭偰偄傑偡丅| 摦嶌 | 僗僀僢僠儌乕僪 | 捠怣儌乕僪 | 摦嶌昞帵 |
| 怣崋偺寁應丒曐懚 | SW1傪墴偡 | "g"傪庴怣 | LED1揰摂 |
| 曐懚僨乕僞偺憲怣 | SW2傪墴偡 | "t"傪庴怣 | LED2揰摂 |
| 曐懚僨乕僞悢偺憲怣 | SW3傪墴偡 | "n"傪庴怣 | 側偟 |
| 怣崋寁應偺僉儍儞僙儖 | SW4傪墴偡 | SW4傪墴偡 | 側偟 |
偙傟偼僷僜僐儞懁僜僼僩傪VB側偳偱嶌傞偙偲傪憐掕偟偨傕偺偱丄僷僜僐儞偵梋寁側僐儊儞僩傗僄僐乕僶僢僋傪憲怣偟側偄傛偆偵 偡傞偙偲偱丄VB偺張棟傪彮側偔偡傞偙偲傪慱偭偨傕偺偱偡丅
捠怣偺愝掕
僷僜僐儞偲偺捠怣偵偼H8/3048F撪憻偺SCI0儌僕儏乕儖傪巊梡偟偰偄傑偡丅SCI0偺愝掕傪埲壓偵帵偟傑偡丅
| 捠怣懍搙 | 38400bps |
| 僨乕僞價僢僩悢 | 8bit |
| 僗僩僢僾價僢僩悢 | 1bit |
| 僷儕僥傿 | 側偟 |
| 僼儘乕惂屼 | 側偟 |
儕儌僐儞怣崋偺寁應偲曐懚
愒奜慄庴岝儌僕儏乕儖偐傜擖椡偝傟傞儕儌僐儞怣崋偺僆儞婜娫丄僆僼婜娫傪慡偰寁應偟偰儊儌儕偵曐懚偟傑偡丅 曐懚偺條巕傪恾4偵帵偟傑偡丅
恾係丏帪娫僨乕僞偺曐懚
僆儞婜娫丄僆僼婜娫偺帪娫寁應偼H8/3048F撪憻儌僕儏乕儖偺ITU1傪巊梡偟偰峴偄傑偡丅ITU1偺擖椡偱偁傞TIOCA1偵 擖椡偝傟傞儕儌僐儞怣崋偺僄僢僕枅乮棫忋傝丒棫壓傝偺椉僄僢僕乯偵僀儞僾僢僩僉儍僾僠儍傪峴偆傛偆偵愝掕偡傞偙偲偵傛偭偰 幚尰偟偰偄傑偡丅傑偨丄ITU1偺擖椡僋儘僢僋偼ITU0偱惗惉偟偰偍傝丄惗惉偝傟傞僋儘僢僋廃婜傪侾兪昩偵偡傞偙偲偵傛偭偰 侾兪昩扨埵偺寁應傪峴偆傛偆偵愝掕偟偰偄傑偡丅
寁應偺廔椆忦審偼埲壓偺擇偮偱偡丅
- 僨乕僞傪奿擺偡傞攝楍偑慡偰巊梡偝傟偨偲偒丅
- 寁應拞偺寁應抣偑H'7FFFF乮524287兪昩乯傪挻偊偨偲偒丅
偨偩偟丄偙偺抣傪戝偒偔偟偡偓傞偲儊儌儕乕偑晄懌偟偰偟傑偭偰幚峴僼傽僀儖偑嶌傟側偔側偭偰偟傑偄傑偡丅摿偵儌僯僞僨僶僢僈 梡偵僐儞僷僀儖偡傞帪偵偼侾侽侽偁傑傝偱儊儌儕晄懌偵側偭偰偟傑偄傑偡偺偱拲堄偑昁梫偱偡丅
恾俆丏曐懚僨乕僞悢偺曄峏
巊偭偰傒傞
僗僀僢僠儌乕僪
僗僀僢僠儌乕僪偱摦嶌偝偣偨偲偒偺僴僀僷乕僞乕儈僫儖偺夋柺傪恾俇偵帵偟傑偡丅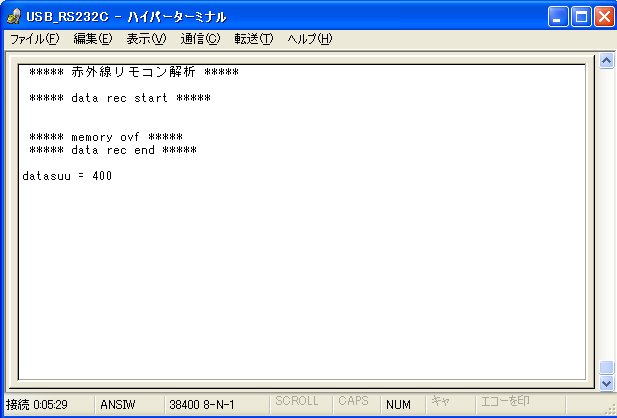
恾俇丏摦嶌夋柺
- 僗僀僢僠儌乕僪偱揹尮傪擖傟傞偲丄僐儊儞僩乽***** 愒奜慄儕儌僐儞夝愅 ****乿偑昞帵偝傟丄LED3偑揰摂偟傑偡丅
- SW1傪墴偡偲寁應偑奐巒偝傟丄僐儊儞僩乽***** data rec start ****乿偑昞帵偝傟丄LED1偑揰摂偟傑偡丅
- 庴岝儌僕儏乕儖偵擟堄偺儕儌僐儞傪岦偗偰儃僞儞傪墴偟懕偗傞偲乽***** memory ovf ****乿乽***** data rec end ****乿 偺僐儊儞僩偑昞帵偝傟丄LED1偑徚摂偟傑偡丅
- memory ovf偼曐懚僨乕僞悢偑嵟戝抣偵払偟偨偙偲傪堄枴偟偰偄傑偡丅崱夞偼儕儌僐儞偺儃僞儞傪墴偟懕偗偨偨傔 嵟戝僨乕僞悢傑偱寁應偑峴傢傟傑偟偨偑丄儕儌僐儞偺儃僞儞傪堦弖偩偗墴偡偩偗偩偲嵟戝僨乕僞悢傑偱偺怣崋偑偙側偄偨傔 僞僀儅乕僆乕僶乕僼儘乕偵側傝傑偡乮寁應抣偑H'7FFFF乮524287兪昩乯傪挻偊偨偲偒乯丅僞僀儅乕僆乕僶乕僼儘乕偵側偭偨偲偒偺 僐儊儞僩偼乽***** timer ovf ****乿偱偡丅寁應廔椆帪偵偼昁偢偳偪傜偐偺僐儊儞僩偑昞帵偝傟傑偡丅
- SW3傪墴偡偲data suu= 偵懕偗偰寁應丒曐懚偟偨僨乕僞偺悢偑昞帵偝傟傑偡丅
- SW2傪墴偡偲曐懚偝傟偰偄傞僨乕僞偑弴師憲怣偝傟夋柺偵昞帵偝傟傑偡丅憲怣拞偼LED2偑揰摂偟傑偡丅傑偨丄僨乕僞憲怣 偺嵟弶偲嵟屻偵偦傟偧傟乽***** data tr start ****乿乽***** data tr end ****乿偺僐儊儞僩偑昞帵偝傟傑偡丅
- 堦斣嵟弶偵憲怣偝傟偰偔傞僨乕僞偼嵟弶偺僆儞婜娫丄偮傑傝儕乕僟丒僐乕僪偺僆儞婜娫偵奩摉偟傑偡丅僨乕僞偼寁應偟偨 弴斣偳偍傝憲傜傟偰偔傞偺偱俀斣栚埲崀偼僆僼婜娫丄僆儞婜娫丒丒丒丒丒偲岎屳偵憲傜傟偰偒傑偡丅
- SW21傪墴偡慜偵丄僴僀僷乕僞乕儈僫儖偺僥僉僗僩偺僉儍僾僠儍傪幚峴偟偰偍偔偲丄憲傜傟偰偔傞僨乕僞傪 僥僉僗僩僼傽僀儖偵曐懚偡傞偙偲偑偱偒傑偡丅
捠怣儌乕僪
捠怣儌乕僪偱摦嶌偝偣偨応崌丄埲壓偺揰偱僗僀僢僠儌乕僪偲堘偄偑偁傝傑偡偑丄摦嶌帺懱偼摨偠偱偡丅- 摦嶌偺巜帵偑僷僜僐儞偐傜憲傜傟偰偔傞僐儅儞僪偱偁傞丅僴僀僷乕僞乕儈僫儖偐傜'g','t','n'側偳偺僉乕傪 墴偡偙偲偱憖嶌偱偒傑偡丅偙偺偲偒墴偟偨僉乕偺僄僐乕僶僢僋偼婣偭偰偒傑偣傫丅
- 僗僀僢僠儌乕僪偱昞帵偝傟偨僐儊儞僩偼慡偰昞帵偝傟傑偣傫丅
寁應僨乕僞
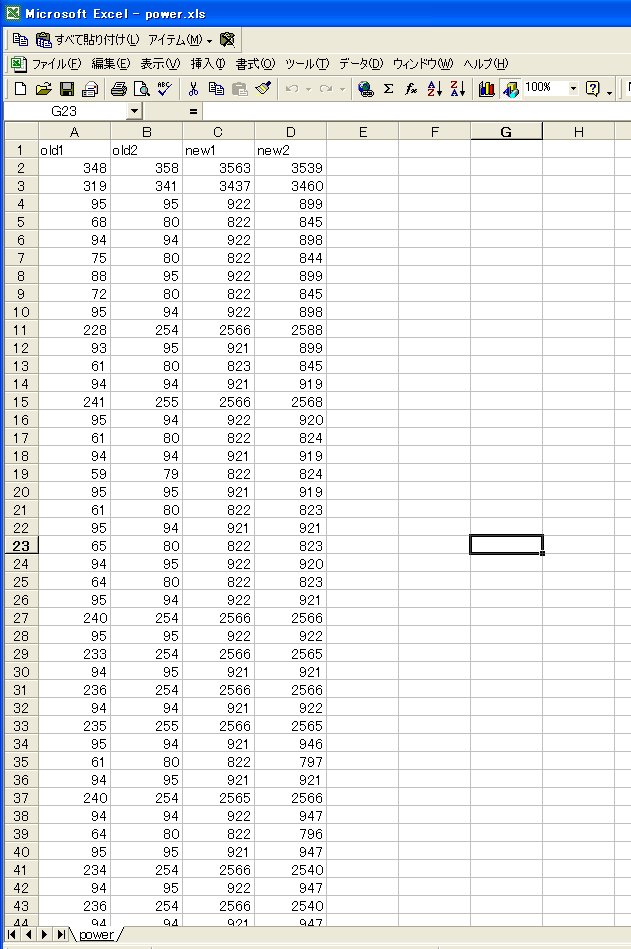
崱夞傕慜夞偲摨偠丄廐寧條偱峸擖偟偨儕儌僐儞偺僨乕僞傪寁應偟偰傒傑偟偨丅
幚偼偙偺儕儌僐儞丄摉帪偐傜擇偮帩偭偰偄傑偟偨丅偦傟偧傟偺POWER偺僨乕僞傪寁應偟偰丄慜夞偺僨乕僞偲斾妑偟傗偡偄傛偆偵 僄僋僙儖僔乕僩偵揬傝晅偗偰傒傑偟偨乮恾俈乯丅慜夞偺寁應僨乕僞偼old1,old2偱丄侾侽兪昩扨埵偱寁應偝傟偰偄傑偡丅崱夞 惢嶌偟偨僜僼僩僂僃傾偱寁應偝傟偨僨乕僞偼new1,new2偱丄侾兪昩扨埵偱寁應偝傟偰偄傑偡丅