
自分で作るのが好きなので、いろいろ自作しています。
自作品の一部を紹介します。
| 観測所 |  |
なんといっても、一番の大物はこの観測所でしょう。 |
| ガイドマウント | 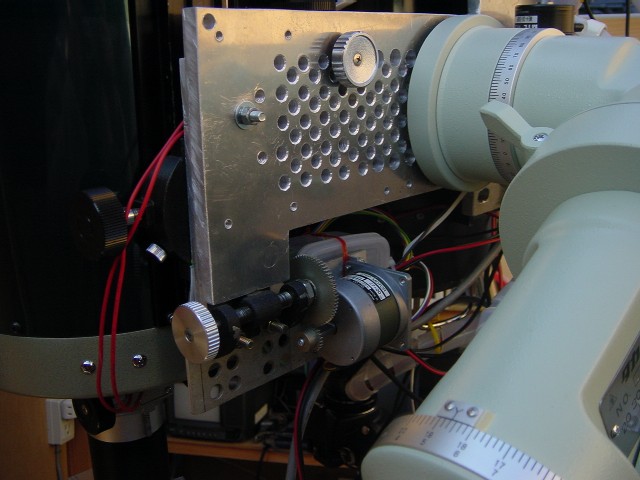 |
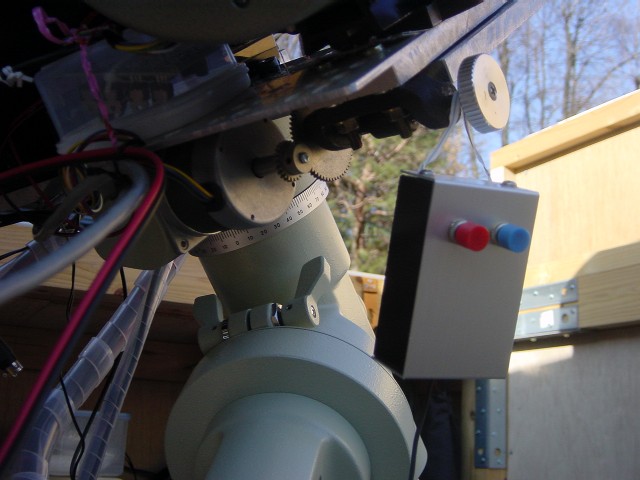
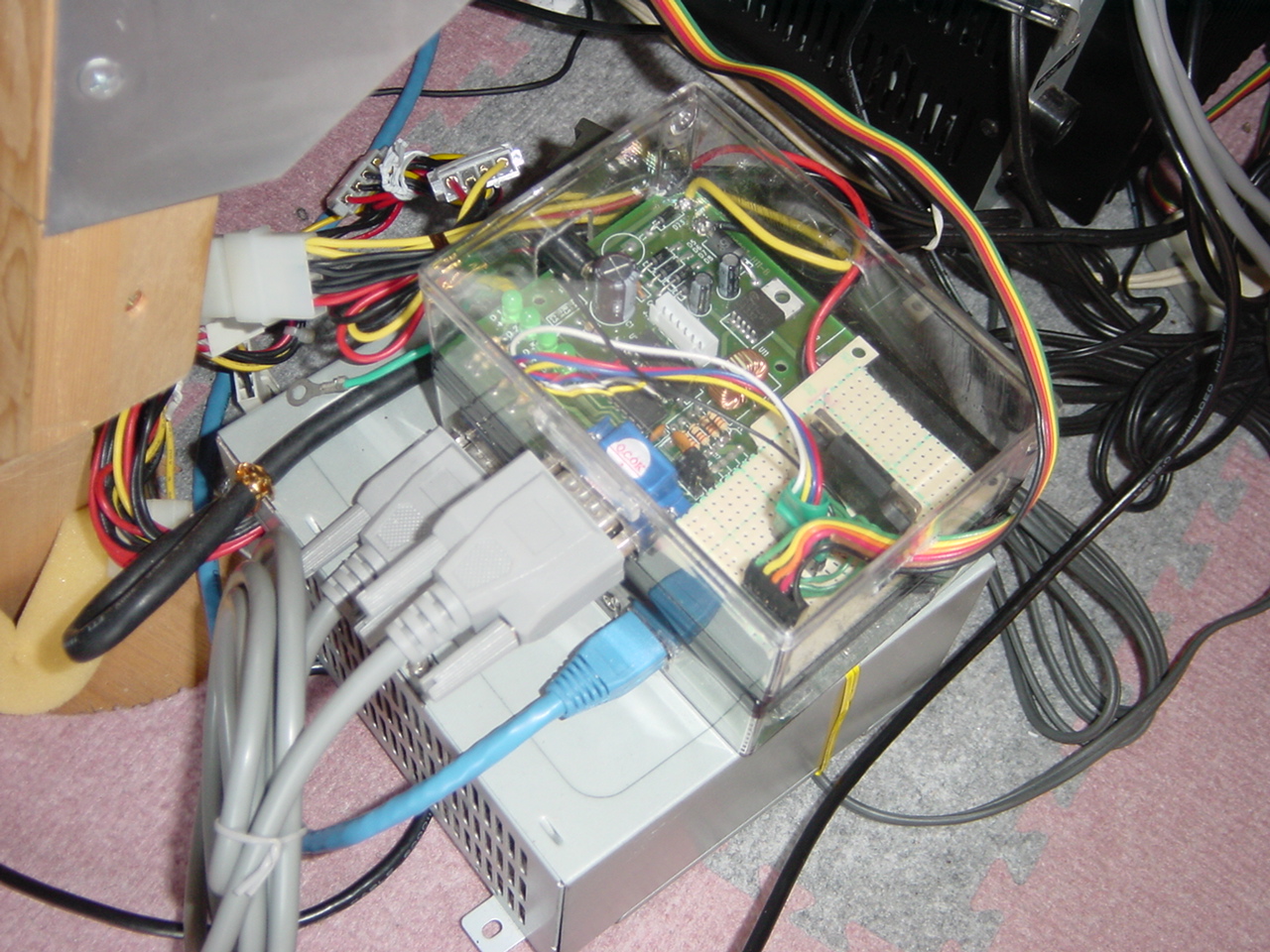
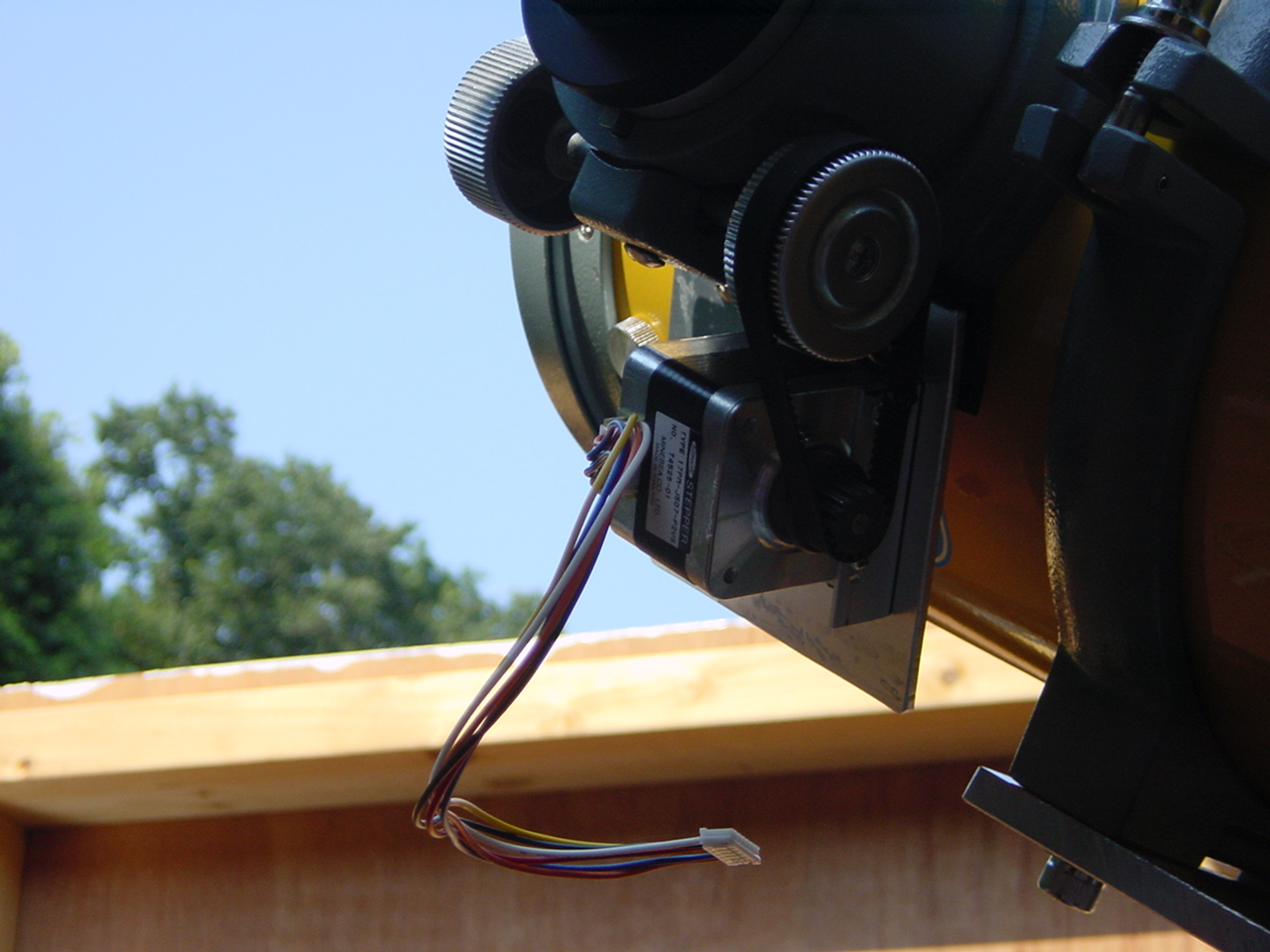
プレート自体も自作ですが、プレートに直付けで赤緯微動つきのガイドマウント自作しました。 赤緯微動は古い赤道儀のウォームギアを用いて、ステッピングモータで駆動します。手元のハンドコントローラ(写真下)で制御できるほか、コントローラのケーブルを伸ばして、母屋にいて遠隔でガイド星探しができます。 振れるのは赤緯方向だけですが、ガイド星探しならこれで十分。 |
 |
||
| ガイドマウント その2 |
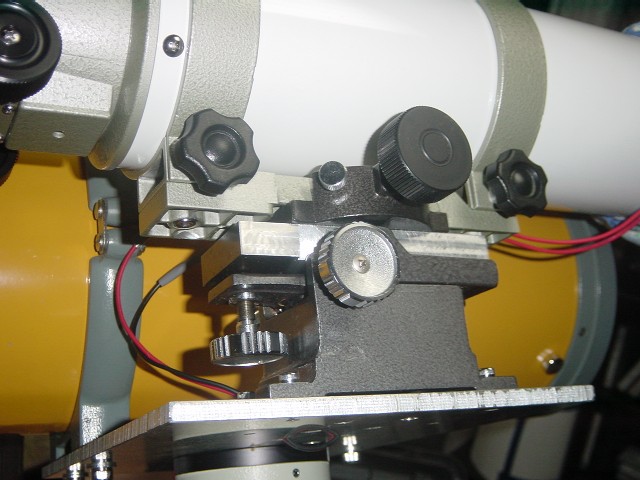 |
ミザールのAR-1用のガイドマウントを改造して、アルミ板を載せて、タカハシ用35mm間隔のネジを切って、アリミゾ金具が付けられるようにしました。 |
| ガイドマウント その2と そのリモートシフター |
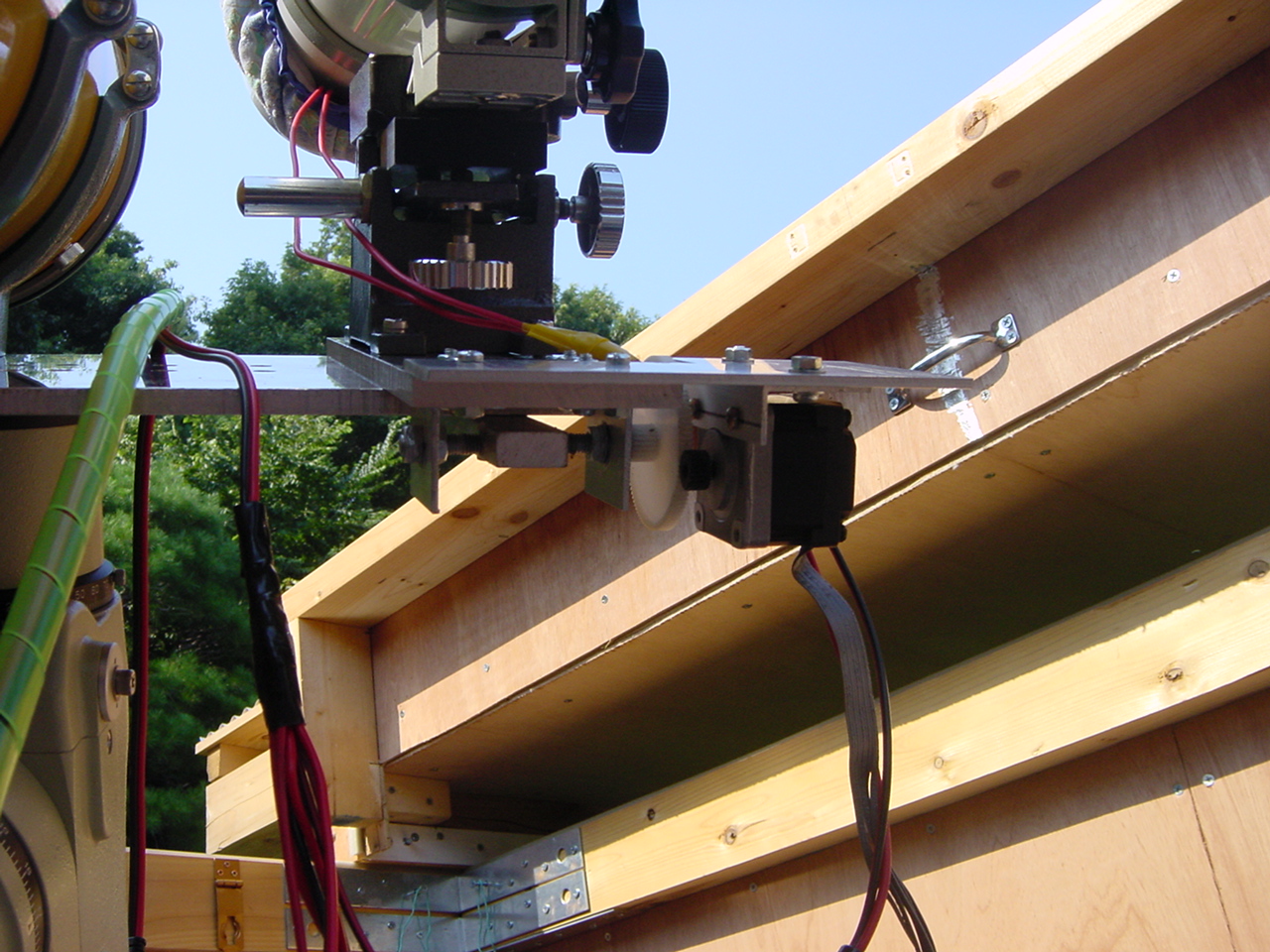 |
ガイドマウント2にステッピングモータの赤緯シフターをつけました。2作目。 |
| イメージシフト | 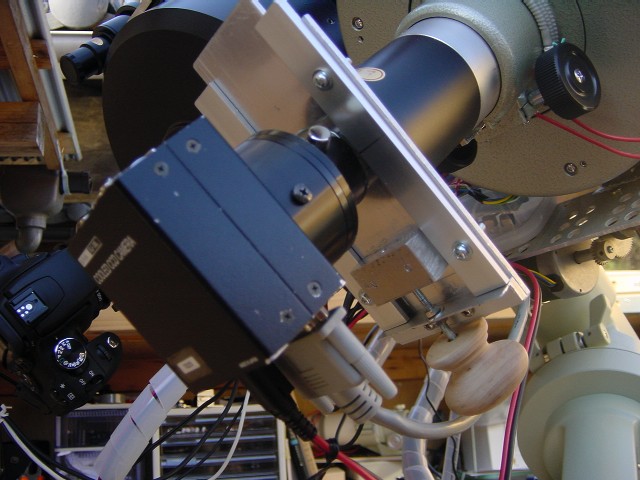 |
アルミ板を組み合わせた、1軸イメージシフトです。 サンドイッチにしたアルミ板をネジでスライドさせます。 望遠鏡側が50.8mmバレル、接眼側が31.7mmスリーブになっているので360度回転でき、全面カバーできます。 |
| ピントゲージ |  |
天文ガイドに、デジタルノギスを使ったピントゲージが紹介されていたので、早速作ってみました。 MEF-1との組み合わせで結構ピント位置の再現性があり、なかなかいいです。 |
| 簡易版 ROBO-FORCUS |
 |
ステピングモータを使ってベルトドライブででピントノブをまわす簡易版ROBO-FORCUS。 ステッピングモータとベルトは古いプリンタの部品。 |
| 簡易版 ROBO-FORCUS |
 |
秋月電子のIP-MoterでFORCUS用のステッピングモータを回します。これで、Etherで遠隔制御できる仕掛け。 |
| 簡易版 ROBO-FORCUS2 |
 |
上記ROBO-FORCUSをε160に付けたところ |
| USB版 ステッピングモータ コントローラ |
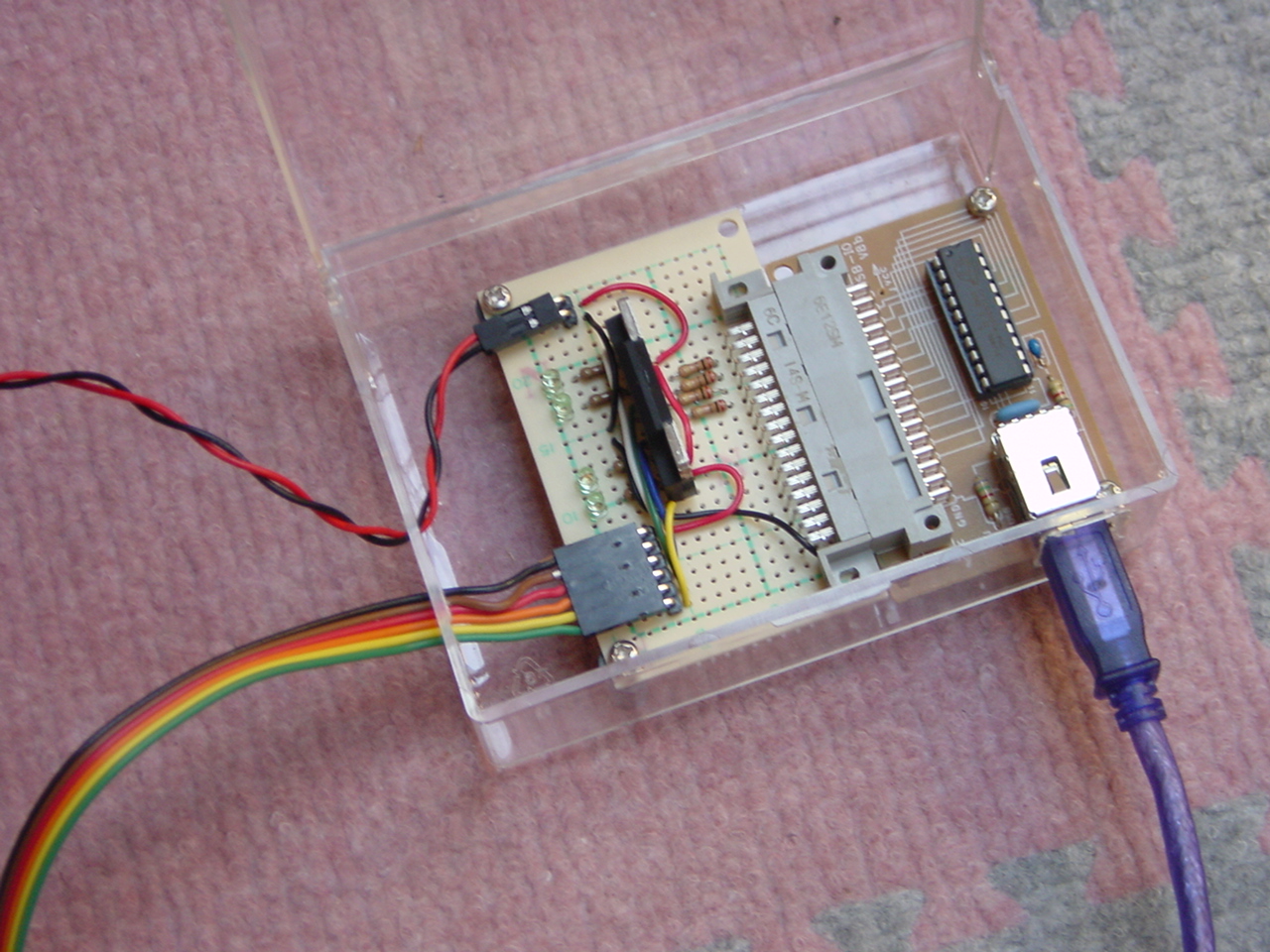 |
USBを使ってパソコンからステピングモータをコントロールするボード。 TECHNO-KITを使ってドライバーを駆動します。 赤緯シフタや簡易版ROBO-FORCUSに使います。 |
| ε200の EOS用ワイドマウント |
 |
ε200の35mm用カメラアダプタが販売終了になっていたので、自作しました。 材料は、ε200のフィルタボックス用のアダプタ(ジャンク)とBORGの7000番のカメラマウントフォルダで、フィルタボックス用アダプタをちょん切って、内側にカメラマウントフォルダをはめ込んで接着。これは49.8mmネジが切ってあるので、BORGの各種マウントが付けられます。今はEOS用。カメラマウントフォルダの内側は48mmネジなので、48mmフィルタがそのまま付けられる。 |
| ピント合わせツール | 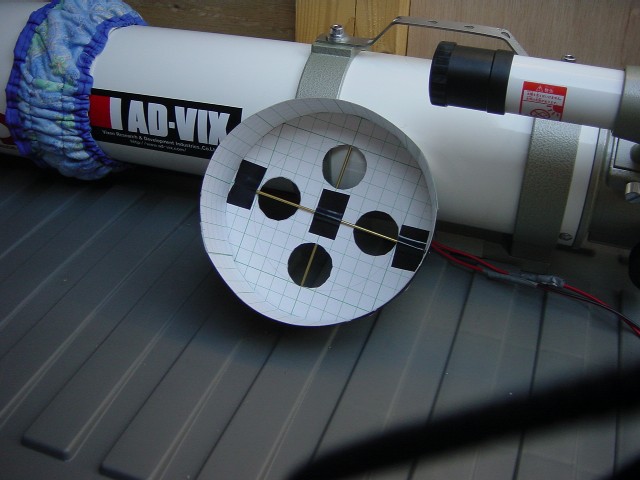 |
簡単なピントあわせツールです。 4つ穴が開いた鏡筒の蓋です。ついでに十字線がいれてあります。 これを、ED102SSの先端にかぶせて使います。 ピントがずれていると星像が4見えてそれが中心で1つになり、最終的にジャスピンで回折の十字か現れるといった具合。 |
| C11トッププレート |  |
C11用のトッププレートです。 穴加工してありいろいろ取り付けられます。 写真は運搬用もち手を付けたところ。 このもち手をはずせば、トッププレートとしてガイド鏡や副望遠鏡を載せられますが、重心が高くなるので、あまり重いのは無理。 |
| ヒータカバー |  |
夜露よけヒータの保温性を高めるカバーです。 これは、奥さんの作品。 キルティング生地にゴムが入っており着脱簡単。 奥さんに感謝! |
| 三脚 |  |
EM200用の自作三脚。 角材を3本組み合わせていますので丈夫です。 三角板は3mmアルミ板製。 石突は、工事現場使う単管パイプを短く切ったものに、単管パイプ打ち込み用の金属コーンをつけています。 |
| 三脚その2 |  |
観測室のNJPを載せている三脚で、構造はEM200と同じ。さらに側面にアルミ板を貼り付けでさらに剛性を強化しています。 三脚の脚は観測室の床面を突きぬけて、ブロックの土台に載っています。 以前はアトラックス用のピラー脚を使ってましたが、この三脚のほうがはるかに丈夫です。 |
| 新架台 | 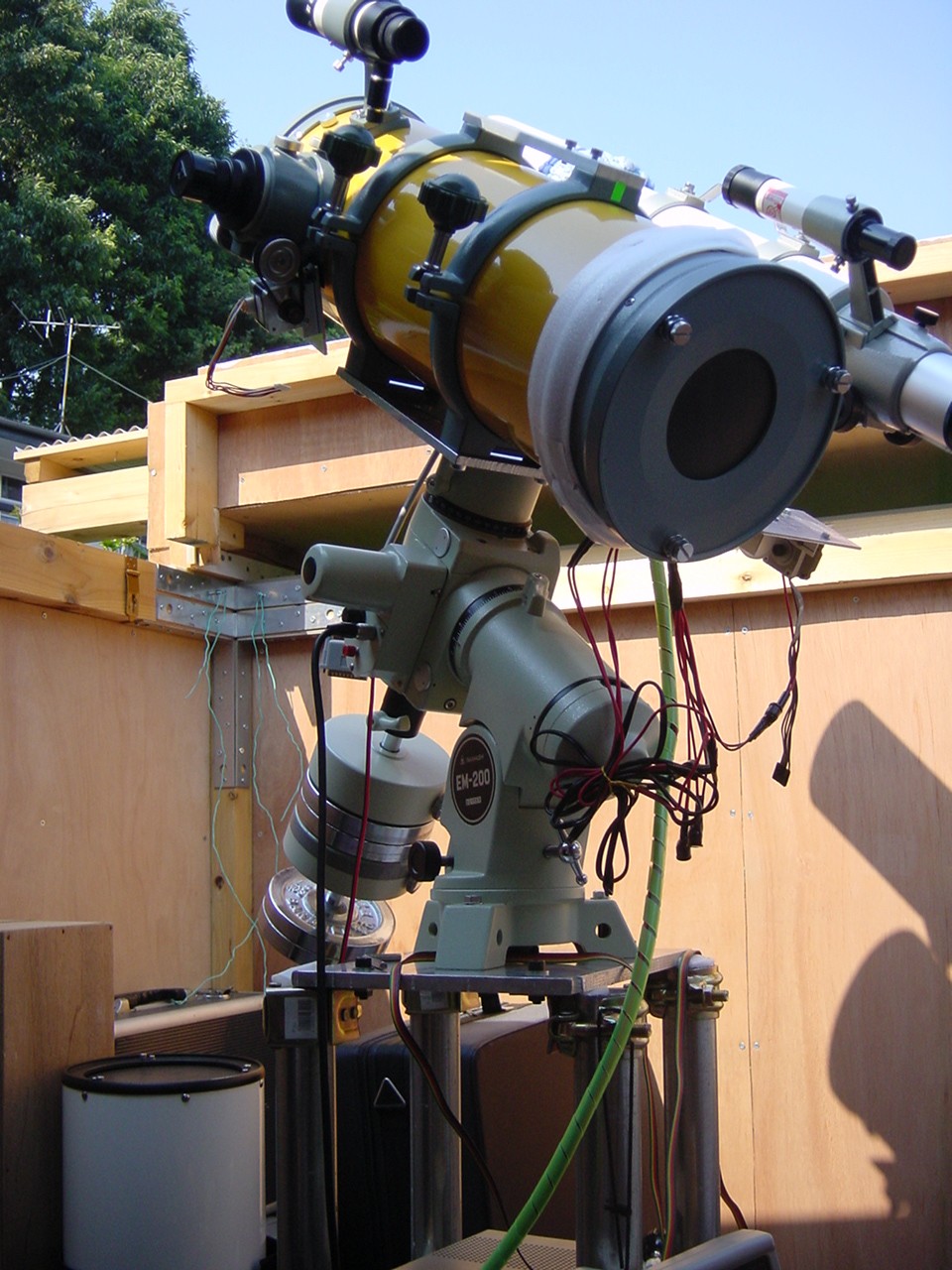 |
観測所を増築してEM-200を載せる架台をつくりました。今度は土台のブロックを積むのが大変なので単管を4本打ち込んで作ってます。 |
| バランスウエイト | 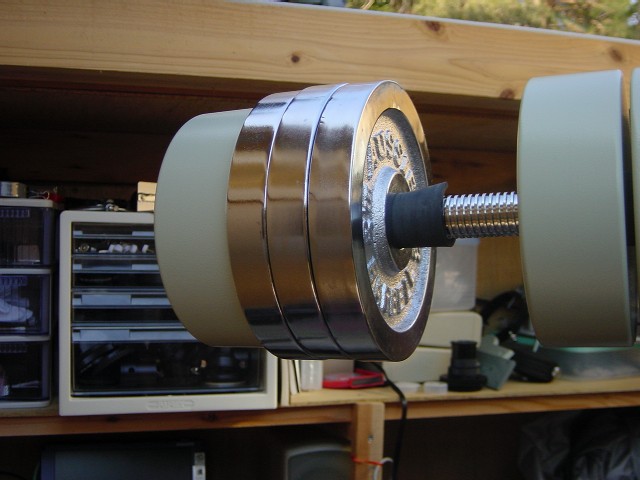 |
これは自作というより代用品。 バランスウエイトの代わりにダンベル用ウエイトを使っています。軸径の補正用にゴム板を丸めています。 2.5Kgずつ加減できるメリットがあります。 注意点は落下防止ために正規のウエイトで挟み込む必要があること。こんなのが足に落ちたら痛いじゃすまない。 |
トップ |
