 |
||||
|
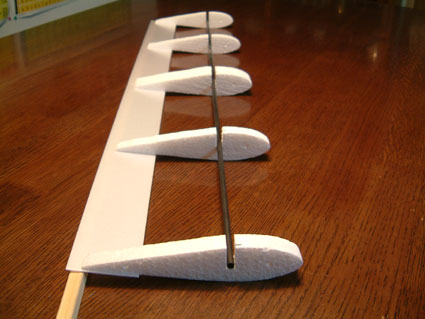
まずは・・・ 20mm厚の発泡スチロール板からリブを6枚作り、中央部は2枚合わせて、カーボンパイプが入るように切り込みを入れます。 ねじれないように、リブとカーボンパイプを接着し、フルプランク(?)にする1mmスチレンペーパーを50mm幅に切り、10mmを上下の重ね代にするので、その分を後ろに出して接着します。 |
||||
 |
||||
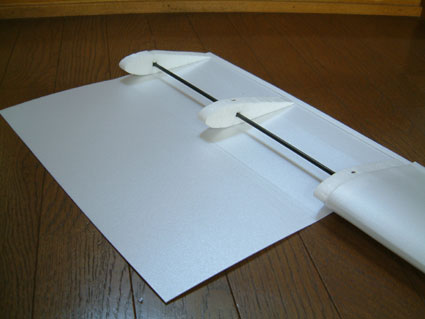
| カーボンパイプを入れた所に、切り取ったものをパイプ分切って、元のとおりに接着し1mmのスチレンペーパーを、くるっと巻きます。
前縁部は、Rが小さいので楊子などで何本かスジを入れておきます。 リブに瞬間接着剤をしっかりつけて、後縁部もきっちり水平になるように接着します。 これだけです! ねじれにも強く、上下左右、ビクともしません! |
||||
 |
||||
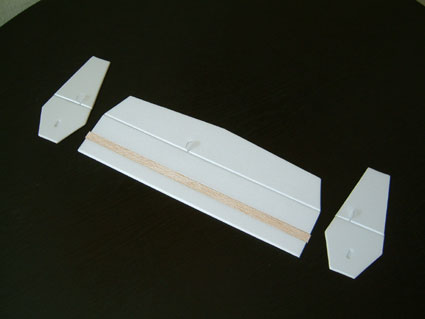
| 尾翼は、2mmのスチレンペーパーを張り合わせて作りました。
もちろん、ヒンジを挟んでおきます。 両ラダーを動かす為のホーンを付けるので、補強に2mmバルサをサンドイッチして上下2枚を張り合わせてあります。(計4mm厚) |
||||
 |
||||
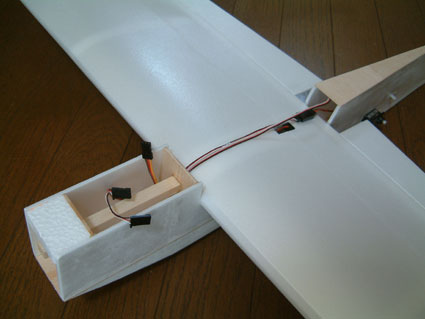
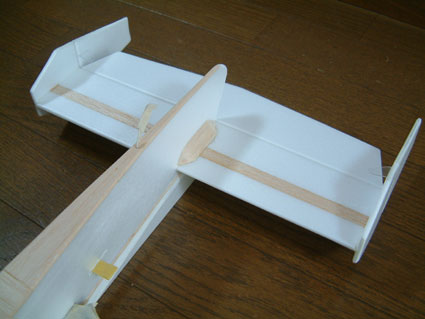
| 胴体は、両側2mmのスチレンペーパーで、前部は2枚にして補強し、後部はぶれないように2mmバルサとスチレンペーパーで、補強してあります。
モーターマウントは、10mm×10mmバルサ棒で、バッテリーの入る大きさに2mmバルサの隔壁を設けてあります。 |
||||
 |
||||
| 後部アップ。
ラダーサーボは、この時点で固定されています。 |
||||
 |
||||
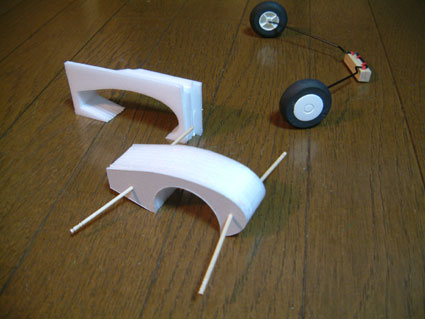
| スパッツは、得意(?)の食品トレーの底を何枚か重ね、型紙を楊子で固定しカットします。
脚は、HOT BODIES社の456MB用のです。とっても軽くて、ちょうどいい大きさです。それを、バルサ棒に糸でくっつけました。 |
||||
 |
||||
| 主翼を胴体に接着します。
後ではできないので、しっかりコードは通しておきます。 バルサを適所に補強のため使ってあります。 |
||||
 |
||||
| バッテリー用の蓋は、後部差し込みの前部ネジ止めになっています。 | ||||
 |
||||
| バルサは、ここに使っています。 | ||||
 |
||||
| 二つのラダーを、これを使って動かします。
GWSのPICOサーボに入っている十字サーボホーンをカットしたものと、サーボ固定用ビス、それとアンテナパイプをカットしたものを各4つ。 |
||||