 |
 |
�}�C���{�b�g������L�i������x�̍������܂Ƃ߂ċL�����Ƃɂ��܂��j
�@H�P�W�D�@�T�D�@�Q (��)�@�� �P���` ��10��
�@H�P�W�D�@�U�D�@�V (��)�@��11���` ��15��
�@H�P�W�D�@�V�D�P�R (��)�@��16���` ��20��
�@H�P�W�D�@�X�D�P�O (��)�@��21���` ��28��
H�P�W�D�P�P�D�P�T (��) ��29���` ��38��
H�P�X�D�@�Q�D�@�P (��) ��39���` ��48��
�g�P�X�D �S�D �R�i�j ��49���` ��57��
�g�P�X�D �X�D�P�S�i�j ��58���` ��79��
�g�Q�O�D �P�D�P�V�i�j ��80���` ��90��
�g�P�W�D�@�T�D�@�Q�i�j
|
|
�@�@�{���łP�O���܂œ��B�B����̍H���Ǘ��Ɏ�����ƂƂ��ɁA���ƌ����Ă�����̐���ӗ~�����������邽�߂ɍ���A����ߒ����L���Ă������Ƃɂ����B�悸�́A����܂ł̍�Ɠ��e�����Љ�܂��B
�@�@����P���@�@�����iID-01�j�̑g�ݗ��āi�ڂ̑g�ݗ��āA�r�f�I�J�������̃J�o�[�̎��t���A�����̑g�ݗ��āj�@
�@�@����Q���@�@�����iID-01�j�̑g�ݗ��āi�㓪���ւ̃}�C�N�̎��t���A�e�X�g�p�o�b�e���[�{�b�N�X�̎��t���j
�@�@����R���@�@���[�^�[�ƃM�A�̑g�ݗ��āi�E�H�[���M�A�V���t�g�̎��t���A�I�v�`�J���G���R�[�_�[�M�A�V���t�g�̎��t���A�����쓮�p�M�A�V���t�g�̎��t���A�I�v�`�J���G���R�[�_�[�E�{�[�h�̎��t���A���[�^�[�{�b�N�X�̑g�ݗ��āj
����S���@�@���}�C�N�Ɩڂ̂k�d�c�̎��t���i���}�C�N�̎��t���A���ڂ̑g�ݗ��āA�E���̑g�ݗ��āj
�@�@����T���@�@��O�}�C�N�̎��t���i��O�}�C�N�̎��t���A���[�^�[�X�e�[�̎��t���A���[�^�[�{�b�N�X�̎��t���j
�@�@����U�� �����������i�e�P�[�u���̐ڑ��A�^�b�`�Z���T�[�E�{�[�h�̎��t���A�^�b�`�Z���T�[�Ɨ����̎��t���o�b�e���[�P�[�X�̎��t���j
�@�@����V���@�@��̃��[�^�[�{�b�N�X�̑g�ݗ��āi���[�^�[�{�b�N�X�`�̑g�ݗ��āj
�@ ����W���@�@��̃��[�^�[�{�b�N�X�̑g�ݗ��āi�M�A�V���t�g�̎��t���j
�@�@����X���@�@��̃��[�^�[�{�b�N�X�̑g�ݗ��āi���[�^�[�{�b�N�X�̑g�ݗ��āj
�@ ����10���@ ��̃I�v�`�J���G���R�[�_�[�̎��t���i�I�v�`�J���G���R�[�_�[�E�f�B�X�N�̎��t���A�I�v�`�J���G�@���R�[�_�[�E�{�[�h�̎��t���j
�@�@�{���܂łŁA�����̎p���`�𐬂��Ă��������B���ꂩ��͓��̈ȉ��̐���Ɉڂ�̂��낤���B�^�b�`�Z���T�[�̃e�X�g�ł�����ɋ@�\�������A�����܂ł͓��i�̖��Ȃ��i�s���Ă��Ă���B�@�@�@�@
�g�P�W�D�@�U�D�@�V�i���j
 |
 |
|---|
�@�@����́A�P�P������P�T���܂ł̍�Ɠ��e���Љ�܂��B
�@�@�@����P�P���@�@�o�b�e���[�P�[�X�̃p�[�c�̊m�F
�@�@�@����P�Q���@�@�o�b�e���[�P�[�X�p�X�e�[�̎��t��
�@�@�@����P�R���@�@�o�b�e���[�P�[�X�����̑g�ݗ��āi�e�R�l�N�^�[�̎��t�������A�e�R�l�N�^�[�̌Œ�A�o�b�e���[�{�b�N�X�p�[�q�t���X�e�[�̎��t���A���C���X�C�b�`�̎��t���A�{�f�B�E�C���^�[�t�F�[�X�{�[�h�̎��t���E�e�R�l�N�^�[�̐ڑ��A�o�b�e���[�P�[�X�̑g�ݗ��āE�Œ�j
�@�@�@����P�S���@�@�o�b�e���[�{�b�N�X�̎��t���i�o�b�e���[�{�b�N�X�̎��t���A�o�b�e���[�{�b�N�X�̃J�o�[���t���A�����p�d�̓P�[�u���̐ڑ��j
�@�@�@����P�T���@�@�w�b�h�R���g���[���[�E�{�[�h�̎��t���i�����P�[�X�̎��O���A�^�b�`�Z���T�[�E�{�[�h����̃P�[�u�����O���A�^�b�`�Z���T�[�E�{�[�h�ւ̃P�[�u���ڑ��A�w�b�h�R���g���[���[�E�{�[�h�ւ̃P�[�u���ڑ��A�w�b�h�R���g���[���[�E�{�[�h�ւ̃X�e�[���t���A�����O����̃P�[�u���ڑ��A�w�b�h�R���g���[���[�E�{�[�h�̃X�e�[�ւ̎��t���A�㓪���}�C�N�̃P�[�u���ڑ��A�����̗��P�[�X�̎��t���E�Œ�j
�@�@�@�P�P���̓p�[�c�̊m�F�̂݁A�P�Q���E�P�S�����l�W����߂邾���̊ȒP�ȍ�Ƃ̂݁B�P�R���̓o�b�e���[�P�[�X�����̑g�ݗ��ĂƂ������Ƃő����̍�Ƃ���B�P�T���̃w�b�h�R���g���[���[�E�{�[�h�̎��t����Ƃɋꓬ��������B����܂ł̍�Ƃł��������ڑ������R�l�N�^�[���O���A�t�������̂����A�R�l�N�^�[�ƃP�[�u���̐ڑ��Ή����ʓ|�Ȃ̂ɉ����ē������ɔz�����������܂����[����̂ɂĂ�����B���̍�Ƃœ����ɓ�������Ă����e�X�g�p�o�b�e���[�P�[�X�����O����A���̃X�y�[�X�Ƀw�b�h�R���g���[���[�E�{�[�h���g�ݍ��܂�đ��X�e�[�W�������B�����ĐV���Ȕ\�͂Ƌ@�\��������A���܂łɂȂ�ID-01���e�X�g����i�K���}����Ƃ̂��Ƃ����A�ڑ��ԈႢ���œ����Ȃ����Ƃ̂Ȃ��悤�肤�݂̂ł���B
�g�P�W�D�@�V�D�P�R�i�j
 |
 |
�@�@����́A�P�U������Q�O���܂ł̍�Ɠ��e���Љ�܂��B
�@�@�@����P�U���@�@�����ƃ��[�^�[�{�b�N�X�̃t�����g�E�{�f�B�P�[�X�ւ̎��t���i���[�^�[�{�b�N�X�̎��t���A�����̎��t���A�X�e�[�̎��t���A�����ƃt�����g�E�{�f�B�P�[�X�̑g�ݗ��Ċm�F�j
�@�@�@����P�V���@�@�t�����g�E�{�f�B�P�[�X�ւ̃{�f�B�P�[�X�p�X�e�[�̎��t���i�{�f�B�P�[�X�p�X�e�[�̎��t���A�e�X�g�p�X�^���h�̎��t���j
�@�@ ����P�W���@�@���r���[�^�[�{�b�N�X�̑g�ݗ��ĂP�i���[�^�[�{�b�N�X�p�M�A�̑g�ݗ��āj
�@ ����P�X���@�@���r���[�^�[�{�b�N�X�̑g�ݗ��ĂQ�i�r�쓮�p�V���t�g�̎��t���A�M�A�ւ̃O���X�h��A�E�H�[���M�A�V���t�g�̎��t���A���[�^�[�{�b�N�X�̊����j
�@ ����Q�O���@�@�E�r���[�^�[�{�b�N�X�̃p�[�c�̊m�F
�@�@�@�@��P�V���������đ�Q�X�e�[�W�̑g�ݗ��Ă��������A��P�W������h�c�|�O�P�Ƃ̉�b�����������R�X�e�[�W�Ɉڍs�B�����ɂ��ꂩ��̃X�e�[�W�őg�ݗ��Ă�d�v�ȓd�q���i�i�L�[�{�[�h�ƃf�B�X�v���[�A�}�U�[�{�[�h�A�����{�[�h�Ȃǁj�ɂ��Ă̊T�v���������Ă���A���{�b�g�̊�ƂȂ�p�[�c�ł��邱�Ƃ͗����ł��邪�A���̋@�\�Ȃ�\���ɂ��Ă͕�����Ȃ����Ƃ���ł���B�����炠��ʐS�z��������A���̎��A���̎��̑Ή��A�C�y�ɂ���čs�����B�P�W�E�P�X���ō��r���[�^�[�{�b�N�X��g�ݗ��Ă����A�M�A�̎��t���Ƒg�ݍ��킹�ɋ�J����B���̓_�ɂ��ẮA��Q�O���Ɂu�p�[�c�����K�ɋ@�\�����邽�߂̗L���ȃq���g�v�Ƃ��ĕ⑫�������ڂ����Ă��ĎQ�l�ɂȂ�B���ґ������r�ŒE���҂��o�Ȃ��悤�ɂ��낢��l���Ă���悤�ł��肪�������Ƃł���B
�g�P�W�D�@�X�D�P�O�i���j
 |
 |
|---|
 |
|---|
�@�@����́A�Q�P������Q�W���܂ł̍�Ɠ��e���Љ�܂��B
�@�@�@����Q�P���@�@�E�r���[�^�[�{�b�N�X�̑g�ݗ��āi�O�̃M�A�̃��[�^�[�{�b�N�X�ւ̑g�ݍ��݁A��̃V���t�g�̉E�r���[�^�[�{�b�N�X�ւ̑g�ݍ��݁j
�@�@�@����Q�Q���@�@�E�r���[�^�[�{�b�N�X�̑g�ݗ��ćA�i�r�쓮�p�V���t�g�̎��t���A�M�A�ւ̃O���X�h��A�E�H�[���M�A�V���t�g�̎��t���j
�@�@ ����Q�R���@�@�{�f�B�P�[�X�ւ̉t���f�B�X�v���[�̎��t���i�{�f�B�P�[�X���瓪���A���[�^�[�{�b�N�X�Ȃǂ̊e�p�[�c�̎��O���A�t���f�B�X�v���[�̎��t���j
�@ �@����Q�S���@�@�f�B�X�v���[����{�^���E�{�[�h�̎��t���i�{�^���ƃf�B�X�v���[����{�^���E�{�[�h�̎��t���j�@
�@�@ ����Q�T���@�@�t�����g�E�{�f�B�P�[�X�ւ̃X�s�[�J�[�̎��t���i�X�s�[�J�[�̎��t���j
�@�@ ����Q�U���@�@�t�����g�E�{�f�B�P�[�X�ɃP�[�u����ʂ��i��{�̃P�[�u�����Z�b�g�A�����`�X�e�[�̌Œ�j
�@�@ ����Q�V���@�@�t�����g�E�{�f�B�P�[�X�ւ̃}�C�N�ƃI�v�`�J���G���R�[�_�[�E�{�[�h�̎��t���i�t�����g�E�{�f�B�P�[�X�ւ̃}�C�N�̎��t���A���E�^���p���[�^�[�E�{�b�N�X�̍Ď��t���A�E�r�p�I�v�`�J���G���R�[�_�[�E�{�[�h�̎��t���A���r�p�I�v�`�J���G���R�[�_�[�E�{�[�h�̎��t���A���r���[�^�[�{�b�N�X�̃t�����g�E�{�f�B�P�[�X�ւ̑g�ݍ��݁j
�@�@����Q�W���@�@�}�U�[�{�[�h�̑g�ݗ��āi�}�U�[�{�[�h�̉����{�[�h�p�X�e�[�ւ̎��t���A�}�U�[�{�[�h���ʂւ̃P�[�u���ڑ��A�}�U�[�{�[�h�̃t�����g�E�{�f�B�P�[�X�ւ̎��t���A�U�[�{�[�h�\�ʂւ̃P�[�u���ڑ��A�}�U�[�{�[�h�ƃw�b�h�R���g���[���[�E�{�[�h�̐ڑ��A�}�U�[�{�[�h�d�͋����P�[�u���̃o�b�e���[�P�[�X�ւ̐ڑ��j
�@�@�@�@��Q�W���̑g�ݗ��Ă��I�����i�K�ł́A�܂��}�U�[�{�[�h�Ɖ����{�[�h�̑g�ݗ��ăX�e�[�W���̂͊������Ă��Ȃ����A���̎��_�ŁA�}�U�[�{�[�h�̃e�X�g���p�ӂ���Ă���B�������Ă���ʂ�A�����Ă����̂��s���ȋC�����ɉՂ܂�Ȃ���A�o�b�e���[�P�[�X�ɓd�r�U���A�}�U�[�{�[�h�̓d�͋����P�[�u�����R�l�N�^�[�ɐڑ����A�X�C�b�`���u�n�m�v�@�ɂ���B�X�C�b�`�����������Ƃ�����Ƃ��������Ȃ��B�������Ȃ��ꍇ�̎w���ɏ]���ē����P�[�X���ĂъJ���āA�w�b�h�R���g���[���[�E�{�[�h�ɐڑ�����Ă���e�P�[�u���̏�ԂƊe�R�l�N�^�[�̐ڑ�����m�F����B���i���͌�����Ȃ��B����܂ł̍�Ɠ��e�̎傾�����������`�F�b�N���Ă݂�B���̂Ȃ̂��낤�B���������B���i�Ɍ��ׂ�����ꍇ���z�肳���B���]�̍�Ƃ��ă��{�b�g�̐���Ɋւ��鎿����t���Ă���T�[�r�X�Z���^�[�i��p�̃t���[�_�C�A���j�ɏ��߂ēd�b����B���������ƌ��i������̂Œ������ő����Ă��������Ƃ̂��ƁB��������đ���B������ɒS���҂���d�b������A�e�X�g�����Ƃ���A�C�j�V�����C�Y����݂̂��J��Ԃ��A���̓���Ɉڂ�Ȃ��̂Ń`�F�b�N�����Ƃ���A�ꃖ���i��P�S���̃p�[�c�i�ߐڃZ���T�[�p�d�̓P�[�u���j�z���̍����Ⴂ������C���B���̑��Ɉُ�͌���ꂸ�A���퓮����m�F�����Ƃ̂��ƁB�e�X�g�œ����Ȃ������̂͂����炭�d�r�ɖ�肪�������̂ł͂Ȃ����Ƃ̎w�E�B�S�{�Ƃ��V�i�̓d�r���g�p�������Ƃ��������ƁA�o�b�e���[�P�[�X�ɂ͂W�{�̓d�r�����邱�ƂɂȂ��Ă��邪�Ƃ̓����B���R�Ƃ���B�o�b�e���[�P�[�X�͗��ƕ\�Ɋe�S�{�v�W�{�����̂ł���B������݂���\�̕����ɂ����d�r�����Ȃ������킯�ł��邩��_�O�ł���B�S���҂Ƃ��ǂ������������肷�����肷��B�u�����ԑ����܂��B���̌�̐����Ɗ撣���Ă��������B�܂������������炲�A�����������v�Ƃ����J�ȑΉ��B���{�b�g���͂������_�ŁA������Ɠd�r�����A����`�F�b�N�����Ƃ��됳��ɍ쓮�B����A��Ɠ��e�͉v�X���G����ɂȂ��Ă������Ƃ��\�z����邪�A��������ΐS�����x���҂̑��݂����邱�Ƃ�������A�X�e�b�v�o�C�X�e�b�v�Ŏ��g��ōs�����ƋC������V���ɂ���B
�g�P�W�D�P�P�D�P�T�i���j
 |
|---|
 |
|
|---|
�@�@����́A�Q�X������R�W���܂ł̍�Ɠ��e���Љ�܂��B
�@�@�@����Q�X���@�@�����M���{�b�N�X�̃p�[�c�P�i�T���̃M���ƂQ�{�̃M���V���t�g�j�ƍ���̍�Ƃ̊m�F�j
�@�@�@����R�O���@�@�����M���{�b�N�X�̃p�[�c�Q�i�I�v�`�J���G���R�[�_�[�E�{�[�h�A�f�B�X�N�ƂR�̃M���A�h���C�u�x���g�j�̊m�F�j�B�{���ɂ́A�h�c�|�O�P�̑���\�t�g�Ɠ���V�~�����[�^�[�A�����X�e�[�W�ō�Ƃ��������Ƃ��d�v�ȑg�ݗ��ăX�e�b�v���܂Ƃ߂��r�f�I�����^�����b�c�|�q�n�l���t�����Ă���A����܂ł̍�Ƃ��m�F�ł���B
�@�@ ����R�P���@�@�������[�^�[�{�b�N�X�̑g�ݗ��ĂP�i�������[�^�[�{�b�N�X�`�ւ̃v�[���[�t���E�H�[���M���V���t�g�̎��t���A�������[�^�[�{�b�N�X�`�ւ̃M���̃V�X�e���̑g�ݍ��݁A�I�v�`�J���G���R�[�_�[�E�{�[�h�̎��t���j
�@�@����R�Q���@�@�������[�^�[�{�b�N�X�̑g�ݗ��ĂQ�i�������[�^�[�{�b�N�X�`�ւ̃��[�^�[�̎��t���A�������[�^�[�{�b�N�X�`�̑g�ݗ��Ċ����A�������[�^�[�{�b�N�X�a�̎��t���A�P�[�u���̔z���j
����R�R���@�@��S�X�e�[�W�i�����{�[�h�ƃu���[�g�D�[�X�E���W���[���A�h�c�|�O�P�̋쓮�V�X�e���̑g�ݗ��āj�̊J�n�i���E�̘r�p���[�^�[�{�b�N�X�̌Œ�j
�@����R�S���@�@���r���[�^�[�{�b�N�X�g�ݗ��Ẵ`�F�b�N�i�������V���t�g�̈ʒu�A�M���̂��ݍ��킹�ʒu�A�V���t�g�ƃM���̕��сj�@�A�����E�P�[�X�̑g�ݗ��Ă̏���
����R�T�� �@�����E�P�[�X�ւ̂k�d�c�{�[�h�̎��t���i�Q���k�d�c�{�[�h�̍����E�P�[�X�ւ̎��t���j
�@����R�U�� �E�ԗւ̃G���R�[�_�[�p�f�B�X�N�̎��t���i�����E�P�[�X�ւ̃G���R�[�_�[�p�f�B�X�N�̎��t���j
�@ ����R�V�� �@�E�ԗւ̃��[�^�[���t���i�v�[���[�ƃM���̑g�ݗ��āA�M���t���h���C�u�V���t�g�̎��t���A�V���t�g�J�o�[�̃h���C�u�V���t�g�p�X�e�[�̑g�ݗ��āA�����E�P�[�X�ւ̃��[�^�[�̎��t���A�h���C�u�x���g�̎��t���j
����R�W�� �@�����{�[�h�̐ڑ��i�����{�[�h�̐ڑ��A�����{�[�h�̕ی�j
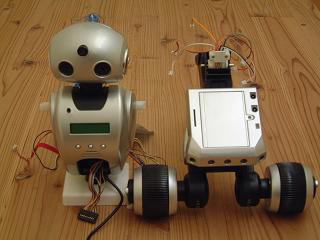
�@�@�@��R�W���ʼn����{�[�h��ڑ������̂ŁA�����R�}���h�ɂ��R�~���j�P�[�V�������ł���悤�ɂȂ�A����܂łɂ͂Ȃ����{�b�g�Ƃ̉�b���\�ƂȂ����B�X�C�b�`������Ɓu����ɂ���@���͂h�c�|�O�P�ł��v�ƌ�肩���Ă���B�܂����{�b�g�Ɂu����ɂ���v�Ƙb��������Ɓu����ɂ���v�A�u���肪�Ƃ��v�Ƙb��������Ɓu�ǂ��������܂��āv�Ƃ��u�h�c�|�O�P�v�Ƙb��������Ɓu���͂����ł��v�ƕԓ�����B��K����̂��̕����Ȃ�Ȃ��@�B��ɓ˔@��K�ŃR�����i���n�߂�B���������Ďv�킸���Ă��܂��B�����悸�ԓ������������Ƃłق��Ƃ���ƂƂ��ɖڂ̑O�ʼn����郍�{�b�g�Ƃ̋������g�߂ɂȂ��������������Ȑe�ߊ����N���Ă���B�g�p�\�ȉ����R�}���h���������p�ӂ���Ă���A���̉����C���^�[�t�F�[�X����āA�l�X�ȋ@�\�̃I���^�I�t�A�ړ��A���b�Z�[�W�̘^���Ȃǂ̖��߂���邱�Ƃ��ł��邾���łȂ��A�����ʼn������邱�Ƃ��ł���悤�ɂȂ����B�������ƃR�}���h�ǂ���ɔ������Ȃ���������B����́A���{�b�g���l�Ԃ̌��t���Ӗ��̂��錾��Ƃ��ė������Ă���킯�ł͂Ȃ��A���̎���C���g�l�[�V�����A�����̎d���ɂ���āA�F���ł��Ȃ����Ƃ����邽�߂ŁA�����ɂ́u�����R�}���h��F�������邽�߂̃|�C���g�v�i�F���������コ���邽�߂̃`�F�b�N�|�C���g�j���Љ��Ă���B���̒��Ƀe���r��G�A�R���̉��A�y�b�g�̖����Ȃǂɂh�c�|�O�P���������R�}���h��F���łȂ����Ƃ�����ƋL����Ă���B���������A�R�����i���Ă���ԁA�������Ȃ������̂�������B�Ȃ��Ȃ��ʔ������̂ł���B�܂��܂��A�����@�\�ɂ��ăe�X�g�Ƃ��Ȃ���Ȃ�Ȃ����Ƃ��c����Ă���B���{�b�g��������T�́A�����̃e�X�g�őދ����Ȃ��ōςނ��낤�B
�@�@
�g�P�X�D�@�Q�D�@�P�i�j
 |
|---|
 |
 |
|---|
�@����́A�R�X������S�W���܂ł̍�Ɠ��e���Љ�܂��B
�@�@�@����R�X���@�@�v�[���[�J�o�[�̎��t���i�E�O�֗p���[�^�[�ƃh���C�u�V���t�g�Ԃ��Ȃ���A�̋쓮�V�X�e���̑g�ݗ��Ċ����j
�@�@�@����S�O���@�@��ւ̑g�ݗ��ď���
�@�@�@����S�P���@�@��ւ̑g�ݗ��āi�ԗփt���[���ւ̃O���[�X�h��A�{�[���x�A�����O�̎��t���A�ԗփt���[���̑g�ݗ��āA�ԗւ̎��t���A�ԗւ̓����̊m�F�A��փX�e�[�ւ̎ԗւ̎��t���j
�@ �@����S�Q���@�@�u���[�g�D�[�X�{�[�h�̎��t���i�u���[�g�D�[�X�{�[�h�ƃP�[�u���Ƃ̐ڑ��A�Ód�C�h�~�p�܂ɂ��ی�A�u���[�g�D�[�X�ʐM�̃e�X�g�j
�@�@ ����S�R���@�@�u�h�c�|�O�P�@�o�b�@�b�������������v�̊�{����̃}�X�^�[�E�����s�X�g���V�X�e���̃p�[�c�̊m�F
����S�S���@�@�u�h�c�|�O�P�@�o�b�@�b�������������v�̊�{����̃}�X�^�[�E��փX�e�[�̃p�[�c�̊m�F
�@ �@����S�T���@�@���O�ւ̋쓮�V�X�e���̃p�[�c�̊m�F
����S�U���@�@���O�ւ����p�[�c�̊m�F
����S�V���@�@���O�֗p�V���t�g�J�o�[�̑g�ݗ��āi���O�֗p�V���t�g�J�o�[�ւ̃h���C�u�V���t�g�p�X�e�[�̎��t���j
����S�W���@�@���O�ւ̋쓮�V�X�e���̑g�ݗ��āi���O�֗p���[�^�[�ƂQ���k�d�c�{�[�h�̎��t���A�I�v�`�J���G���R�[�_�[�E�{�[�h�̎��t���A�������P�[�X�ɂ���������ւ̃O���X�h��A�v�[���[�ƃM���̑g�ݗ��āA�M���t���h���C�u�V���t�g�̋������ւ̎��t���j
�@�@�@����́A�p�[�c�̊m�F��Ƃ������A�g�ݗ��Ă�y���݂͗]��Ȃ��A�ڂɌ�����O�i�͏��Ȃ��B
�@�@�@��S�Q���Ńu���[�g�D�[�X�{�[�h�A�u���[�g�D�[�X�ʐM�Ȃ邱��܂ŕ��������Ƃ̂Ȃ��p�ꂪ�o�ꂵ�f���B�u�c�|�O�P�v�̓u���[�g�D�[�X�{�[�h�ɂ��p�\�R����g�ѓd�b���疳���ʐM�ɂ���ĉ��u���삪�\�ɂȂ�Ƃ̂��ƁB�u���[�g�D�[�X�ʐM���s�����߂ɂ́A�u���[�g�D�[�X�A�_�v�^�[���K�v�ƂȂ�B�A�_�v�^�[�Ȃ���̂͂���܂ő����Ă��Ă��Ȃ��B�����Ă݂�Ƒn���������Q�T���܂łɕt���Ă��鉞�匔���W�߂Ĉ������܂łɑ���ƃv���[���g�����Ƃ̂��ƁB�g�ݗ��ĊW�̃y�[�W�����낭�ɓǂ�ł��Ȃ��̂ł���Ȃ��Ƃɂ͋C�Â����A������Ō��ǁA���璲�B������Ȃ����ƂɂȂ�B�������A�߂��̃p�\�R���V���b�v��K�˕����Ă��Y��������̂͂Ȃ��A�C���^�[�l�b�g��ʂ��Ē��B���邱�ƂɂȂ�ꑛ���B������Ȋ������������Ƃɉ����A����Ȃ��Ƃ������āA�A�_�v�^�[�͎茳�ɓ͂������̖̂����ɂ��̂܂܂ŁA�ʐM�e�X�g�Ȃ�u�o�b�@�b�������������v�̊�{����̃}�X�^�[�̕����͎������ԁB���̌�A��ւ��T���Ă��肻�̑O�ɑ������g�܂˂Ǝv���Ă���B
�g�P�X�D�@�S�D�@�R�i�j
 |
 |
 |
|---|
�@����́A�S�X������T�V���܂ł̍�Ɠ��e���Љ�܂��B
�@�@�@����S�X���@�@�����P�[�X�̑g�ݗ��āi�����P�[�X�ւ̃v�[���[�E�J�o�[�̎��t���A�ڑ��P�[�u���p�{�[�h�ւ̐ڑ��P�[�u���̎��t���A�������P�[�X�ւ̍������[�^�[�{�b�N�X�̑g�ݍ��݁A�������P�[�X�ւ̐ڑ��P�[�u���p�{�[�h�̎��t���A�P�[�u���̔z���A�����P�[�X�̊����j
�@�@�@����T�O���@�@�ʐM�C���^�[�t�F�[�X���m������o�b�^�u���C���ڑ��{�[�h�W���i�̊m�F
�@�@�@����T�P���@�@�b�l�n�r�J�����ƃu���C���{�[�h���Ȃ��b�l�n�r�J�����ڑ��{�[�h�W���i�̊m�F
�@ �@����T�Q���@�@�u���C���{�[�h�̓��ځi�u���C���{�[�h�Ƃo�b�^�u���C���ڑ��{�[�h�Ƃ̐ڑ��A�h�c�|�O�P�ւ̃u���C���{�[�h�̎��t���A�u���C���{�[�h�n�r�̃C���X�g�[���j
�@�@ ����T�R���@�@�����ւ̂b�l�n�r�J�����̎��t���i�b�l�n�r�J�����̂b�l�n�r�J�����E�X�e�[�ւ̑g�ݍ��݁A�b�l�n�r�J�����Ƃb�l�n�r�J�����ڑ��{�[�h�Ƃ̐ڑ��A���������J�o�[�̎��O���A�����ւ̂b�l�n�r�J�����̑g�ݍ��݁j
�@�@�@����T�S���@�@�u���C���{�[�h�̃e�X�g�E���ԗփz�C�[���̊W���i�̊m�F
�@�@�@����T�T���@�@�u���C���{�[�h���ڂŒlj��E�g�������V�@�\�̊m�F�E���ԗփ^�C���̊W���i�̊m�F
�@�@�@����T�U���@�@���O�ւ̃x�[�X���ւ̎��t���i���O�ւ̑g�ݗ��āA���O�ւ̃x�[�X���ւ̎��t���j
�@�@�@����T�V���@�@�E�O�ւ̃x�[�X���ւ̎��t���i�E�O�ւ̑g�ݗ��āA�E�O�ւ̃x�[�X���ւ̎��t���j
�@�@
�@�@�@�@�@��T�V���������Ăh�c�|�O�P�̃x�[�X�i�@�B�I�ȕ����̂݁j����������B�x�[�X�ɂ͂R�̎ԗցi�Q�̋쓮�O�ւƂP�̕⏕��ցj�����ׂđ����A�쓮�O�ւ̂̃��[�^�[�A�M���V�X�e���@�\�A�d�͋����⓮��𐧌䂷��P�[�u���A����ɂ̓r�[�R���₻�̓_���E�����𐧌䂷��p�[�c�������B��������ƓI�ɂ́A��T�S���̃u���C���{�[�h�̃e�X�g�Ƒ�T�T���̃u���C���{�[�h�̓��ڂŒlj��E�g�������V�@�\�̊m�F��Ƃ͂܂��s���Ă��炸����̉ۑ�ƂȂ��Ă���B�܂��A�u���C���{�[�h�n�r�̃C���X�g�[���ɓ������ẮA�䂪�p�\�R���Ƀp�\�R���p�V���A���P�[�u���̑Ή��|�[�g���Ȃ����߁A�t�r�a�^�V���A���E�|�[�g�ϊ��̂��߂̃R���o�[�^�[�̓���Ɏ�Ԃ�v�������Ƃ������Ĉꉞ�C���X�g�[����������ł��邪��Ɠ��e���m�F�ł������܂������M���Ȃ��B����A�\�t�g�֘A�̍�Ƃ͂܂��܂������o�Ă���Ǝv���邪�A��V�������œ����ɂ��B�Ƃ������A��V�T���܂ł��Ƃ���Ǝc��͂��ƂP�W���̂݁A�ǂ�ǂ�`�͏o���オ���Ă����ł��낤����撣��ȊO�Ȃ��낤�B
�g�P�X�D�@�X�D�P�S�i���j
 |
 |
|---|
�@����́A�T�W������V�X���܂ł̍�Ɠ��e���Љ�܂��B�v���Ԃ�̍X�V�ɂȂ��Ă��܂��܂������A���̊Ԃ��낢��Ɨ\�����ʂ��Ƃ�����A��V�������܂����B�悸�A�V�T���Ŋ����Ǝv���Ă�����A�������������̂��m�点�����āA��ύD�]�ɂ��X�O���܂ʼn�������Ƃ̂��ƁB�V�U������́A�������̐V�����@�\��lj��E�g�����A��荂�@�\�Ȃh�c�|�O�P����������Ƃ���B��ςł͂��邪�A�����ł�߂�킯�ɂ͂������d���Ȃ��B�i�V���ȋ@�\�F����͂ނh�c�|�O�P�̎�A���ʂ̕��̂����m����ԊO���̋ߐڃZ���T�[�A�����R���̑����Ȃǁj��V�T���܂ł̐�����I���āA�@�\�`�F�b�N�����Ă݂��Ƃ���A�n�r������ɍ쓮������ɐi�܂Ȃ��B�T�[�r�X�Z���^�[�Ɋm�F�����Ƃ���A�u���C���{�[�h�n�r�̃C���X�g�[�������܂������Ă��Ȃ��\��������Z���^�[�ŃC���X�g�[���������̂ő����Ăق����Ƃ̂��ƁB�{�̂��ƃZ���^�[�ɑ���P������ɑ����Ă������̂̏�Ԃ͑���O�̏�Ԃƕς��Ȃ��B�ēx�A�Z���^�[�ɑ������Ƃ���A�A�[���R���g���[���[�{�[�h��̉�H�s�ǂ��������A�A�[���R���g���[���[�{�[�h���������Ă��炢����Ɛ���ɍ쓮�B��̉�H�s�ǂ���f�l�ł͂ǂ����悤���Ȃ��A����ȏōX�V�������A�����݁A����ł����Ƃ������܂ł��Ĉ���S�B
�@�@�@����T�W���@�@���A�E�{�f�B�P�[�X�̑g�ݗ��Ċm�F�i���A�E�{�f�B�P�[�X�̎��t���m�F�j
�@�@�@����T�X���@�@�d�q�{�[�h�����[����o�b�N�p�b�N�P�[�X���\�����镔�i�̊m�F�Ȃǁi���A�E�{�f�B�P�[�X�ƃo�b�N�p�b�N�P�[�X�����P�[�X�̎��t���m�F�j
�@�@ ����U�O���@�@�x�[�X�R���g���[���[�E�{�[�h�̎��t���i�x�[�X�R���g���[���[�E�{�[�h�ւ̊e��P�[�u���̐ڑ��j
�@�@�@����U�P���@�@�����g�Z���T�[�E�{�[�h�̎��t��
�@�@�@����U�Q���@�@�����g��M��̎��t��
�@�@�@����U�R���@�@�����g�Z���T�[�V�X�e���̊����i�����g��M��̎��t���A�o�b�e���[�P�[�X�̕��j
�@�@�@����U�S���@�@���x�Z���T�[�̎��t��
�@�@�@����U�T���@�@�����p�̉�H��A�u���b�h�{�[�h�̐ݒu�i�u���b�h�{�[�h�̎��t���j
�@�@�@����U�U���@�@���Z���T�[�ƒ�R��ɂ���H�쐬�i�x�[�X�R���g���[���E�{�[�h�̐ڑ��A�o�b�e���[�P�[�X�Ƃ̐ڑ��A�{�f�B�̑g�ݗ��āj
�@�@�@����U�V���@�@�u���b�h�{�[�h�p�P�[�u���i��H�p�P�[�u���̔z���j
�@�@�@����U�W���@�@�A�[���R���g���[���[�E�{�[�h�̎��t���i�o�b�N�p�b�N�����P�[�X�̎��t���A�A�[���R���g���[���[�E�{�[�h�ւ̐ڑ��j
�@�@�@����U�X���@�@����r�̑g�ݗ��āi����r�C���^�[�t�F�[�X�E�{�[�h�̐ݒu�j
�@�@�@����V�O���@�@���O�r�̑g�ݗ��āi�����{�^���̎��t���A�����{�^���p�X�e�[�̌Œ�A�~�j�|�[�g�t���{�[�h�̐ݒu�j
�@�@�@����V�P���@�@�^���g���[�̑g�ݗ��āi�R�l�N�^�[�̃g���[�ւ̎��t���A�^���g���[�̑g�ݗ��āj
�@�@�@����V�Q���@�@�r�̎��t�������i�A�[���R���g���[���[�E�{�[�h�̎��O���A�{�f�B�P�[�X���J���Ęr�p�ڑ��P�[�u����ʂ��A���E�̘r�p�ڑ��P�[�u����ʂ��A�����P�[�u���p�X�e�[�̎��t���A�ڑ��P�[�u���̃{�[�h�ւ̎��t���A�A�[���R���g���[���[�E�{�[�h�̎��t���A���̂ق��̓d�q�{�[�h�̎��t���j
�@�@�@����V�R���@�@���r�̊����i�����X�e�[�̎��t���A����r�̑g�ݗ��āA�Ђ��W���C���g���̑g�ݗ��āA���O�r�̑g�ݗ��āA�E�r�̑g�ݗ��āj
�@�@�@����V�S���@�@���F�k�d�c�̃n���h���C�g�i�k�d�c�n���h���C�g�̑g�ݗ��āA�^���g���[�̎��t���j
�@�@�@����V�T���@�@�o�b�N�p�b�N�̃����P�[�X�̎��t���i�o�b�N�p�b�N�̑g�ݗ��āj
�@�@�@����V�U���@�@���{�b�g�n���h�̎w�̑g�ݗ���
�@�@�@����V�V���@�@���{�b�g�n���h�̊e��M�A���i�̊m�F
�@�@�@����V�W���@�@���{�b�g�n���h�p���[�^�[���i�̊m�F
�@�@�@����V�X���@�@���{�b�g�n���h�̑O�r���̑g�ݗ��āi���{�b�g�n���h�̎w�g�ݗ��āA�M�A�V�X�e���̑g�ݗ��āA�w�̃P�[�X�ւ̃Z�b�g�j
�@
�@�@�@�h�c�|�O�P�́A���[�U�[���g���v���O�������쐬���Ȃ��Ă��A�����R�}���h��p�\�R���A���̃{�^���Ȃǂ��瑀��ł���悤�ɂȂ��Ă��邵�A�����ɐG��邱�Ƃɂ���ă^�b�`�Z���T�[�������A���锽����Ԃ����ƂɂȂ��Ă���B�������A�h�c�|�O�P�̖{���̖��͂́A���[�U�[���Ǝ��ɍ�����v���O�����ɂ���Ă����̔������J�X�^�}�C�Y���邱�Ƃ��\�Ȃ��ƂƂ���Ă���B���̈Ӗ��ł��ꂩ��ςݎc�����v���O���������肪���Ă����Ȃ���Ȃ炸�A�m���̖R�����҂ɂƂ��ē��̒ɂ����Ƃł���B�����������܂ł���Ă����̂�����A���Ƃ��Ȃ�̐��_�Ŋy���݂Ȃ�����g��ł������Ǝv���Ă���B
�g�Q�O�D�@�P�D�P�V�i�j�@�@�@�@�@
 |
 |
|---|
�@����́A�W�O������ŏI���ƂȂ�X�O���܂ł̍�Ɠ��e���Љ�܂��B�X�O���͂P�Q���S���Ɋ��s����܂��������₩��ŔN�����̍X�V�ɂȂ��Ă��܂��܂����B�ꉞ�A�n�[�h�����̑g�ݗ��Ă͂��ׂďI�����܂����B�������A�v���O���~���O�ɌW�镔���͂ǂ�������ł��̓s�x��ɂ��Ă��܂��A�S���ƌ����Ă����قǎ�����Ă��܂���B���̂��ߊ�{�I����͂�����̂̌��Z���T�[���g�����s���ȂNj@�\���܂���B�ē��ł̓v���O���~���O�ȂǗL���ő�s���Ă���郊�y�A�Z���^�[������݂����ł����A�܊p�����܂Ŏ��͂őΉ����Ă����̂ŁA���ꂩ��������ƊW�ӏ���ǂݒ����A�������������Ǝv���Ă��܂��B
�@�@�@����W�O���@�@���{�b�g�n���h�̂Ђ��p�[�c�̊m�F
�@�@�@����W�P���@�@�ԊO���Z���T�[�L�b�g�̃p�[�c�i�R���f���T�[�ƒ�R�j�̊m�F
�@�@�@����W�Q���@�@�ԊO�����M��̃p�[�c�̊m�F
�@�@�@����W�R���@�@�ԊO���Z���T�[�V�X�e���̑g�ݗ��āi��R�A�R���f���T�[�A�P�[�u���̐ڑ��A���M��̑g�ݗ��āA�ԊO���Z���T�[�̃e�X�g�j�@�@
�@�@�@����W�S���@�@�����P�[�u����ی삷��p�[�c�i�J�o�[�j�̊m�F
�@�@�@����W�T���@�@�ԊO�������R�����\������p�[�c�i�����R���P�[�X�j�̊m�F
�@�@�@����W�U���@�@�ԊO�������R�����\������p�[�c�i�Œ�p�l�W�A�����R���J�o�[�j�̊m�F
�@�@�@����W�V���@�@�ԊO�������R�����\������p�[�c�i�����R���p�P�[�u���j�̊m�F
�@�@�@����W�W���@�@�ԊO�������R�����\������p�[�c�i�����R�����M��Ǝ�M��j�̊m�F�@
�@�@�@����W�X���@�@���{�b�g�n���h�̑g�ݗ��ĂƑ����i�O�r�̕����A�V�����Ђ��̎��t���j
�@�@�@����X�O���@�@���j�o�[�T���ԊO�������R���̑g�ݗ���
�@����A�c���ꂽ�v���O���~���O���̍�Ƃ��I��点�A���ׂĂ̋@�\���쓮����悤�ɂȂ�������߂Ă��Љ�����܂��B