{kind=link}

���݃A�[���͒P�̂ł͒��Â������ȐV�i�ȊO���肵�ɂ����B�@���ÃA�[�����n�C�t�@�C���������ɓ���顁@�t�H�m�R�[�h���Ȃ����͓̂��Ɉ�����ɓ���B
����Ό����ĕ��㎲�Ƃ������R���A�[���͎���\�����A�ߍ��̃n�C�C���s�[�_���X��MM�ł̓n�����E���₷���i�A�����R���FR6SE����̓n�����o�Ă��Ȃ��[�A�[���f�ނƃJ�[�g���b�W�V�[���h�ɋ������g��Ȃ��ׁj�B �ߋ��i1980�N���j�ɂ�FR��FR-6SE�Ƃ�SONY��XL-50�Ƃ�Audio-Technica��AT24�Ȃ�DC200���O���MM����������@���o�͂�MC�����K���Ȃ̂�������Ȃ��B�@���R���A�[���ɂ��Ă͏��R��͒��u���[�R�[�h�E�I�[�f�B�I�̊v���v1984�N�P���[���s�ɏڂ���������Ă���
�ƌ����Ȃ���A���R�������ݎg���Ă��Ȃ��̂͒P�Ɍl�I�ȗ��R����ł���B�i���ׂČ�����ɂȂ邪�j�^�[���e�[�u���������Ƃ���ɉ������߂��Ă��Ē����A�[�����g���Ȃ�/�e���̂��ߓx�X�Z���~�b�N�A�[����܂��Ă��܂���/�]���̃A�[���ł��Ȃ�Ƃ��䖝�ł��鉹�ɂȂ������X�B
�����A�[����̎����ł���������Ă���B������p�Ɍł߂����3-4�{�̋����_�������Ă���Ƀx�[�X�����A���̏�ɃA�[�����悹��BOrtofon/SME���̓X���C�h�x�[�X���ʂȂ̂ŋ��p�ł���͂���@���搶�̓A�[���ƃ^�[���e�[�u���͐U���������łȂ��Ƃ����Ȃ��ƌ����ăL���r�l�b�g�g�p�������߂邪�A�������ĐU�����R���g���[���ł���Ǝv���̂Ń^�[���e�[�u����3�̃\���{�Z�C�������ɏ悹�P�ƂŎg���Ă���
���R���ȊO�̎���A�[�������݂����ʃy�[�W�B
�^�[���e�[�u����3�_�x���ƃA�[����̓Ɨ��̖��_�F �P�D�^�[���e�[�u���̎��ӂ���]�̔��͂Ńu���u���U�邦��ƃA�[���ƐU���������ɂȂ�Ȃ�����B�]��ɂ��y�����[�^���j�b�g���_�炩������S�����g��Ȃ�����X�J�[�Ƃ����̂�4�_�x���̔��ɍڂ������[�^�ł����͎��̂���͓�����Ȃ��̂Ƃ��̔��͂��傢�Ɉ���������͎̂�����Ă��Ȃ��B�T���X�C�͂��̔��͐U�����������iUS����4425638/4475185-1984)�Ƃ��ĕ⏕���[�^�]����DD���[�^�iSilent Synchrotor System)���J�����������ō̗p����Ȃ�����(�e�X�g���R�[�h��125Hz�M���̃g���[�X�o�͔g�`��������Ă��邪���̍��͔����ő傫�ȉ��P�Ƃ͂����Ȃ������j�B �Q�D�A�[����͂��ꑊ���̏d�����K�v�[���a���猋�\�ȗ͂ň���������B���̕ϓ�����͂̂ق�����L�̔��͂����ۂɂ͑傫���Ȃ邱�Ƃ�����A�ƍl�����SME���̃X���C�h�x�[�X�����x�̂���x�����@�ł͂Ȃ��B�Ɨ������A�[����͍H�v����Ŋ��ł��d�S��Ⴍ�d���o���܂��B �R�D��Ԃ̗��_�̓A�[����̈ړ����ȒP�Ȃ̂ŃI�[�o�[�n���O�̒������y�B Fluctuation�̂Ȃ��x�����@�Ƃ����͎̂��݂��Ȃ��B��C�o�l�ł�Q�Ƌ��U�_������B��C�|���v�Ńe�[�u�������̂��G�A�[���͂̔���������B���̖��̃x�A�����O�ł����̂̔���������B������������肪�Ȃ��B
Keith�@Monks�@Laboratory�@Pickup Arm�@�@���ʉE�[�Ɍ�����
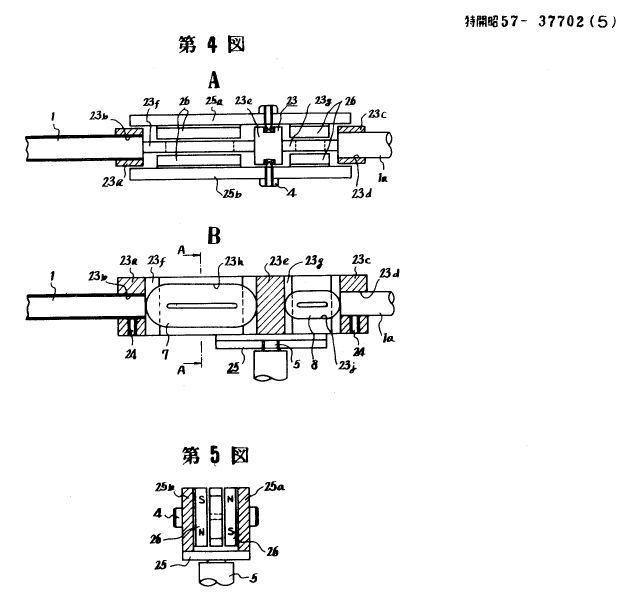
�����|�C���g���̍ʼnE���Ƃ���1970�N�ォ�炠��C�ɂ�����A�[�����������ŏI�o�[�W����? M9BA MK3����肵���B�U���̌������猾���ė��z�I�ȃ����|�C���g�A���������x�̃l�b�N�ƂȂ��A�[����̃R�[�h�̂˂��ꂪ�Ȃ�����ړ_�i���̐�����_���v���ʂ�����j�A����ɃV���R���I�C���ɂ��x�_�����A�A���`�E�X�P�[�g�@�\�͎��ɂ�閳�ڐG���ƔO���������\����@�B��̌��_�͐���ړ_���낤��@���₪�_������̂��A���T�Ԃō����疌���t���ɒ[�ɐڐG�������Ȃ�n�����E���͂��߂�B����I�Ƀs�������������Ȃ���Ȃ�Ȃ����A���◭���̂ł����ɃA�[�������Ɛ��₪���ڂ��댯������B���{�ł͂ƂĂ����i������Ȃ����A���Ȃ琻���Ҕ����ӔC�i��������PL�@�j�Ɉ���������㕨��@�ق��̕s�ւȂƂ���͌y�ʂȃJ�[�g���b�W�i5-7g�j�����ڂ����Ȃ����ƂƁA�V�F����̌^�Ŏ��t���l�W���C���`�l�W�Ő��Ă��邱�ƁA�������V�F�����Pmm���Ɣ����B�@������ɂ��Ă����ɓO�����A�[������@���̃A�[�����}�O�l�b�g���A���`�E�X�P�[�g�@�\���V�~�����[�V���������y�[�W�����܂����B�@Micro�@MA-505�@�@���ʍ��[�Ɍ�����
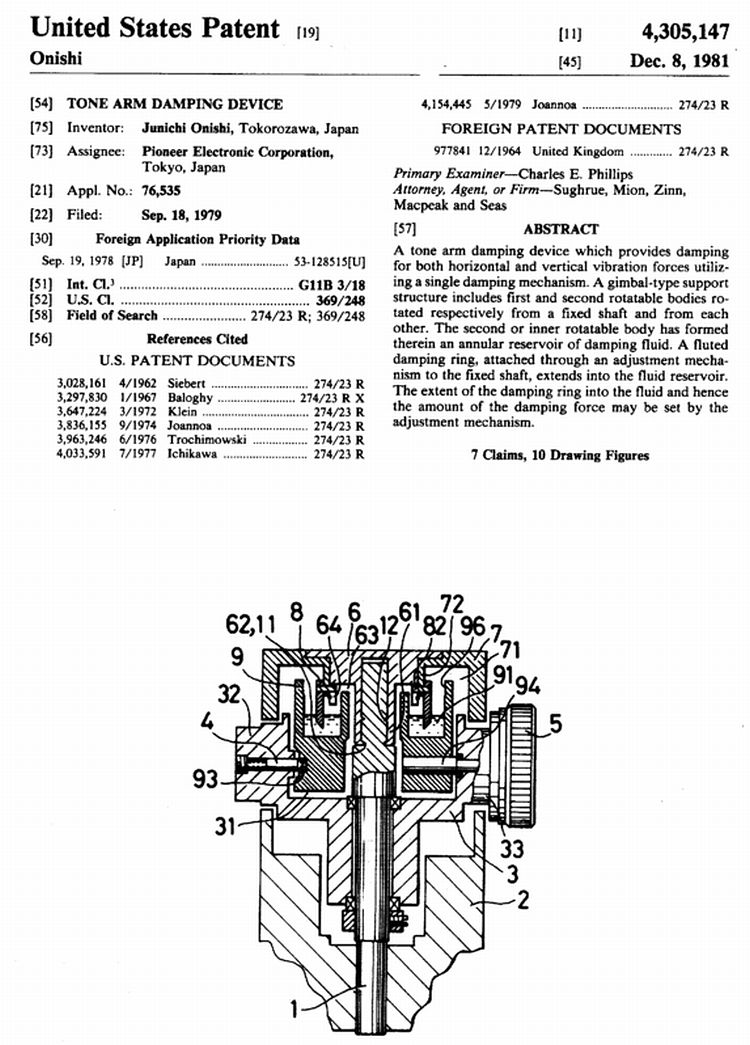
�P976�N�i1975�N��?�j�ɔ�������Mark III�܂ŃV���[�Y�����ꂽ�_�C�i�~�b�N���A�[����@���̏���^�̓��j�o�[�T��S���^�C�v�ŃA�[���p�C�v�͌����ł��Ȃ���@���̃A�[���̃��j�[�N�Ȃ̂́A�Đ����ł��j����A���`�X�P�[�e�B���O�t�H�[�X���ς��������Ɓi�閧�͒����p�x�����Ɨ����Ă���ਁj�B����ɐj���ƃA���`�X�P�[�e�B���O�t�H�[�X���A�����Ă���A�ېj�A�ȉ~�j���ꂼ��̃A���`�X�P�[�e�B���O�t�H�[�X�ڐ������邱�ơ�@�j��0.5g���炩������̂Ŋ��x���ǂ���@���J�D���̐l�ɂ͂��܂�Ȃ�����ݎ莝�������̃A�[����SME3009 Series II Improved Integrated Arm�i�V�F����̌^�y�ʃA�[���j��Infinity�̂�͂�i�C�t�G�b�a�E�I�C���_���v����̌^�A�[����CEC�̉��z�����|�C���g�E�I�C���_���v���A�[��HA-937�i���ʉ��j�B�@SME��Infinity�͌y�ʃJ�[�g���b�W�i���MM�j�p�ɃX�g�b�N���Ă��邪�A�i�C�t�G�b�a�̓����|�C���g�Ɣ�ׂ�ƃK�^������悤�Ŏg���Ă��Ȃ��i�����|�C���g���͍��E�̃o�����X������������ɂ߂ă��M�b�g�j�B�@CEC�͏d�ʋ�MC�Ɏg���Ă���B�@�b�d�b�̃A�[����JELCO�ւ̊O���i�炵�����l�̃A�[�������O�̃v���[���ɓ��ڂ���Ă��܂��B"One Point Cross Suspension System"�Ə̂��邻�̎��\���͎s�����č�����4033591�|1977���擾���Ă��܂��[���e�I�ɂ͏]���̊O����gimbals�Ŏx��������ɑ��ăA�[�����S����O���Ɍ�������gimbals�V�X�e�����\�����Ă��܂�(���̃~�\���H�v�͓����}�̉��o�[15�ɂ���܂��j�B���S��(1�̏㕔�j�Ƀ_���s���O�I�C������݂�10�̏㕔����_���s���O�I�C�����̃M���b�v�����邱�Ƃɂ��i�A�[���̏㉺���ɗL���ȁj�σ_���s���O�E�V�X�e�����lj��ł��܂��B�p�C�I�j�A�̉σ_���s���O�A�[���i�č�����4305147�|1981�j�͏㕔�̃_���s���O�L���b�v�����S���ɒ�������\�����Ƃ邱�Ƃɂ�萂�����������łȂ������������_���v����܂��BJELCO SA-750D��SUMIKO��MMT�iS���A�[���j��X�g���[�g��FT3/4�̓R�̎��^�ɒ���o�����Œ�ˋ��̏㕔�Ƀ_���s���O�L���b�v��ݒu���邱�Ƃɂ���Đ����E���������σ_���v�ɂȂ��Ă���悤�ł��B

Infinity Black Widow�ɂ��āF�X�s�[�J�[�ŗL���ȕč�Infinity�Ђ�Mayware�Ђ�Formula�S�Ɏ��Ђ̃}�[�N��t���čĔ̂��Ă�����1977�N�����А��i��Black Widow�������B�����̃��f���̓I�C���o�X���������̂������B1980�N�O��GF�Ƃ�Mark II�Ƃ��������f���������邪�A���̂ǂ��炩�Œ�拤�U���_���v����I�C���o�X���t�����B�I�C���o�X�̈ʒu�̓A�[���p�C�v��ɕt�������̂ƃJ�E���^�[�E�G�C�g���ɕt�����^�C�v������i���̂͑O�҂Ńi�C�t�G�b�W���������₷���s���ȋC������j�[���s����̐��i�������̔����Ă���Ƃ����v���Ȃ��BGF�̓O���X�t�@�C�o�[���̈Ӗ����HBlack Widow�̃p�C�v�͖{���J�[�{���t�@�C�o�[���ŃV�F�����ŏ��ɂ��n�C�R���v���C�A���X��MM�J�[�g���b�W(���d4�`8.5g)��Ώۂɂ��Ă��܂����B�A�[���P�̂̓������ʂ�3g�Ő��E�Ōy�ʂƎ咣���Ă��܂����BBlack Widow�̊J���҂̈�l�͓��{�l��1977�N�ɕč��ӏ��o�^��\�����܂����iD251558-1979)�BInfinity�Ђ͓������J�[�{���t�@�C�o�[�����j�A�g���b�L���O�A�[�����ڂ̃^�[���e�[�u�����J�����������삪�s����ŗʎY�Ɏ���Ȃ������R�[���ɐ��Y��������i���s���K�ɗ��ʂ��Ă���炵���B�I�[�f�B�I�͖{���ɉ����������ł��ˁB���������̂��D���ȍD���Ƃ����O���킸���݂����ł��ˁB���l�������Ă��Ȃ����ʐ��Y���f���⎎��i�̖��́B
�}�C�N����MA-505���e�X�g/�V�~�����[�V�����������ʂ��ʃy�[�W�Ɉڂ��܂����B�b�d�b�Ȃǂ̃o�l���̃L�����Z���[���u����͂����y�[�W�����܂����F�o�l���L�����Z���[�̃y�[�W
�����J�[�g���b�W���g���Ă��A�[���ɂ���ăT�[�t�F�[�X�E�m�C�Y��g���[�X�͕ς��B �W���E�F�C�g�Əd�ʋ��E�F�C�g�ǂ���ł��o�����X������ꍇ�A�ǂ��炪�ǂ��̂��낤�H�@�j�ʒu���猩���A�[���̊������ʂ̓J�E���^�[�E�F�C�g�̈ʒu�ŕς�鎖���ŋ߂ɂȂ��Ēm��܂����iSME�����ω��������������\���Ă��܂��j�B ��ԍ���̂́A�A�[�������E�Ɍ��������U���Ď~�܂�Ȃ��Ȃ艹��т���g�ݍ��킹������B�J�[�g���b�W�̃_���p�[��������Ă���̂��R���v���C�A���X������Ȃ�ਃA�[��+�J�[�g���b�W��fo�_�ŋ��U�̃s�[�N��}�����Ȃ��ƍl������B ���U�_fo�Ƌ@�B�C���s�[�_���X�F���U�_fo�̓A�[���̎������ʂƃJ�[�g���b�W�̃R���v���C�A���X/�@�B�C���s�[�_���X���W����B ��łɂȂ��Ă���R�{���v�u���R�[�h�v���[���v(���{�����o�ŋ���1971)����Q�l�ɂȂ肻���ȕ����iP.252�`P253�j�����p���܂�(�ꕔ�ҏW���܂���)�B
QUOTE
�A�[�����]�i���X���g��ft���ǂ̒��x�ɑI�ׂ悢���͖��ł��B�������g�M����20Hz���x�܂ł̐����������Ă��܂��B����A�G���M�����l���܂��ƁA1�`��Hz�̒ቹ��ɂ̓��R�[�h�̂����ΐS�ɂ��G������������A25Hz�t�߂ɂ̓��[�^����̎G���U��������܂��B�����ŁA�����ш�����S�ɃJ�o�[���A��������L�̂悤�ȎG���U���̏��Ȃ�10Hz�t�߂ɃA�[�����]�i���X���g����I�Ԃ̂�����ł��B����́A�G���U�������̑������g���ƃA�[�����]�i���X���g������v���܂��ƁC���̎G��������傫���s�b�N�A�b�v���Ă��܂��̂ŁA���������邽�߂ł��B(����)�@
Cb�i�R���v���C�A���X�̈Ӗ��ŋ@�B�C���s�[�_���X�Ɣ���Ⴕ�܂��j
�s�b�N�A�b�v�S�̂̓�������mt
Cb�����ϓI��25x�i10�̃}�C�i�X6��jcm�^dyne�Ɖ��肷��ƃA�[�����]�i���X���g��������10Hz�ɂ��邽�߂ɂ�mt��10g�łȂ���Ȃ�܂���B�s�b�N�A�b�v�̓������ʂ̓s�b�N�A�b�v�w�b�h�̎��ʂ�1.5�`2�{�ł�����A�w�b�h�̎��ʂ�5�`7g�łȂ���Ȃ�܂���B�i���ۂ̃J�[�g���b�W�ƃV�F���̍��v�w�b�h���ʂ̕���16g�Ƃ���Ɓjmt�͖�30g�ɂȂ�܂�����A�[�����]�i���X���g��������ft�iHz�j��1/2p��mtxCb����6Hz�ɂȂ��Ă��܂��܂��B�A�[�����]�i���X���g����10Hz�ȏ�ɂ��邽�߂ɂ́A�����ƌy���J�[�g���b�W���K�v�ɂȂ�܂��B�ŋ߁A���̂悤�ȓ_���l������āA�b���y�ʂȃJ�[�g���b�W��y�ʂȃw�b�h�V�F�����o�n�߂Ă��܂��B(����) rp(�A�[���x�_�̓�����R)rb�i�A�}�`���A�x�����̓�����R�j�݂̂Ő��������ꍇ�Arb�Ő�������ƒ�����̋@�B�C���s�[�_���X���������Arp�Ő�������Ƃ����ቹ��̋@�B�C���s�[�_���X���������邱�Ƃ��킩��܂��B �y�j���Ń��R�[�h���Đ����邽�߂ɂ́A�e���g���ł̋@�B�C���s�[�_���X���Ⴍ�Ȃ���Ȃ�܂���B���������āArb�͍�����̎��g�������Ƌ@�B�C���s�[�_���X�������K���ɂȂ�悤�ɂ��߁A�A�[�����]�i���X��rp�ɂ���Đ�������̂��悢�Ƃ����܂��B�������Crp�����܂�ɑ傫������ƁA�����ቹ��̋@�B�C���s�[�_���X���������邽�߂ɁA���R�[�h�̂����ΐS�ɂ��A�����ቹ��̎G���U���ɒǐ�����K�v�̂��߂ɁA���R�[�h�̂����ΐS���Ȃ��ꍇ�ɕK�v�Ȑj���̂ق��ɁC�]���̐j����K�v�Ƃ��܂��B
UNQUOTE
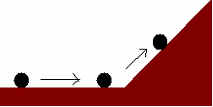
A model of arm explaining the effective mass measured at stylus point.
Important points: 1) The difference of concept between Simple WEIGHT (gravity
weight) and MASS (inertia mass). Weight at some point can be reduced by
balancing, but mass itself remains same 2) Inertial MASS DISTRIBUTION as viewed
from stylus point. This drawing shows an imaginary
model of tonearm as a
rotational system. The rotational inertia I=Effective Mass*L^2.
Effective Mass=I/L^2. Effective mass of pickup as rotational system is not simple weight,
but equivalent inertial mass of pickup system as viewed from stylus point. This drawing shows
situation at 0 balance (equilibrium). There are 3 types of tonearm.
A) In static
balanced arm VTF (vertical tracking force) is obtained by shifting counter
weight nearer to pivot, thus the unbalanced portion of head mass multiplied by
gravity acceleration (980cm/s^2) became VTF(vertical tracking force) such as 3*g
(3gf) at stylus point.
B) Modern dynamic balanced arm is a type of arm whose VTF is added by spring or
magnet after equilibrium.
C) Old type of dynamic balanced arm applies spring
force for supporting head mass without using counter weight where VTF = head
mass minus big spring force. Type C is almost obsolete because it
requires big spring force hindering the fine adjustment of VTF. However
type C is still used for some economy & compact record players (higher VTF
around 3.5g fixed & cartridge bonded to arm wand).
�A�[���̊��x�������i���C��R���Ⴂ�j�قǗǂ��Ƃ������Ƃł͂Ȃ��悤�ł��B�y�ʏd�ʃn�C�E���[�R���v���C�A���X�̃J�[�g���b�W���ׂĂɑΉ�����A�[���͑��݂��Ȃ��悤�ł��B������<�_���s���O��>��搂����e�N�j�N�XEPA-100��e�Гd�q�A�[�����A�i���O�Ő����ɊJ�����ꂽ���R������悤�Ȃ̂ł����A���Ђ̌���ꂽ�J�[�g���b�W�Ƃ̑g�ݍ��킹�����ł̓��[�J�[�̎咣�ɐ����͂��Ȃ��悤�Ɏv���܂����i80�N����Victor�̉p���J�^���O�ł͌����ɐ������ꂽ�f�[�^�������L��������̂ł����j�B���̏؋��ɋ@�B���^�d�q����Damping Arm�͎嗬�ɂȂ�܂���ł����B����Ƃ��J�[�g���b�W�����ւ����������y���ރ}�j�A�̕����ُ�Ȃ̂ł��傤���H �f���I���̋Ǘp�A�[��DA-302�͌y�ʉ������Z���V�F���i�R�����j�Ɛ�pDL-103�̑g�ݍ��킹�ŋ��U���g����11Hz�ɂȂ�悤�ɐv����Ă��܂����iDL-103��10Hz�O��̃R���v���C�A���X�͋K�i�Ŏ�����Ă���100�g���̏ꍇ���傫��10��10^(-6)cm/dyne�O�゠��悤�ł��j�B�w�b�h���d�߂ɂ������ȃ}�j�A����̎g�����Ƃ͐�������Ă��܂��B
Arm�@Resonance��ސ�����F
���̋��U���g��������ŃA�[���ƃJ���`���o�[�̓����₷���̕ω��_Turnover�Ƃ����Ȃ��܂��B
�܂肻�̎��g���ȉ��ł͂����ς�A�[���S�̂��x�_���ɓ����J�[�g���b�W�͔��d���ɂ����B
����ȏ�ł̓A�[���̊������傫�����a�ׂ̍����ϒ��ɂ͔��������X�p�C�����a�̓�����ǂ������B
���������̈���ƒx�������̈����2�̘r�i�A�[���j�������悤�ȓ����ɂȂ�̂ł͂Ƒz�����܂��B
���U���g���E�R���v���C�A���X�E�������ʂ̌v�Z�V�~�����[�V������Resonance�i�G�N�Z���t�@�C���j���������������B�A�������͂����܂ł��v�Z��̂��̂ł��i�J�[�g���b�W��˂��̏d�������̂܂ܒlj��������ʂɂȂ�킯�ł͂���܂���[�j�悩�猩��Ə����y���Ȃ�j�B
��ʓI�ȌX���Ƃ��Ē��ڂ��ׂ��́A���U���g������������قNj��U�̃s�[�N�͒Ⴍ�Ȃ邱�Ƃł��B1977�NB&K�̕�Audible Effects of Mechanical Resonances in Turntables��Ladegaard��16Hz�O��̍��߂̋��U���g���𐄏������w�i�͂����ɂ���B�ȉ��̐}�̓J�[�g���b�W��ւ����A�J�[�g���b�W���܂߂��A�[���̎������ʂ�55/40/25/10g�ƕω��������ꍇ�̋��U�V�~�����[�V�����̈��B��ʓI��dB�\���łȂ����Ƃ͂��������������B1�u����_�Ƃ��Ă��܂��̂�8�u��18dB�A4�u��12dB�ɂȂ��Ă��܂��܂����A����̓A�[�����̃_���s���O�@�\��A�[���x�_�̒�R�̉e����r���������߂ŁA�Ȃ�炩�̃A�[���_���s���O�̉e��(�A�[���x�_�̒�R�j���������ł͂�����-6dB���x�s�[�N���}�����Ă��邱�Ƃ������悤�ł��B�܂�A�[�����x�����������ǂ��ꍇ������[�A���A���̖��C��R�͊��炩�ŕω���K�^�����Ȃ����Ƃ��v������@�B���x�͍��������ǂ��B
�j��W�A���R�[�h�̖��C�萔µ�Ƃ������A�C���T�C�h�t�H�[�X��Wµsin (arm-offset angle) �B����ƁA�A�[���̃I�t�Z�b�g�p�������O�A�[���̕��ς�17�x�i�V���[�g�^�C�v�ł�21�`24�x�j�Ƃ����ꍇ�A�T�C��17�x�͖�0.3�A���R�[�h�̖��C�萔��0.3�Ƃ���C���T�C�h�t�H�[�X��0.3��0.3=0.09�Ŗ�j���̂P���̉�]�͂��A�[���ɓ����v�Z�ł�(9�C���`�̃V���[�g�A�[����12%���x�j�B���̃C���T�C�h�t�H�[�X�ɂ�荶�`�����l���a�ɗ]�v�Ɉ��͂��|���肻�̕��E�`�����l���a�Ɋ|���鈳�͂�����܂��B����Ńg���[�X���s����ɂȂ邱�Ƃ�����̂Ŋe��C���T�C�h�t�H�[�X�L�����Z���[���u�����܂�܂����B�Ƃ��낪���ۂ͉��a�̏�ԂȂǂɂ�薀�C�͕͂ω�����̂ŃA���`�X�P�[�e�B���O���u�͐j���̂��̂����A�[���̈���̂��߂ƍl�����Ă��܂��B�X�s�[�J�[�̃_���p�[�̖����ƌ������猾�������ł��傤���H�j��ƍa�ŋN���門�C���A�[���̉�]���j��ւ̃T�C�h�t�H�[�X�̊Ԃɂ͎��Ԃ�A�[���̊������l���Ȃ��ėǂ��̂ł��傤��?�@�A�[���̉�]�Ɛj��ւ̃T�C�h�t�H�[�X�͓����ł����A�A�[������]���n�߂�ɂ͊���������̂ł����疀�C�Ƃ̊ԂɎ��ԍ�������̂ł͂Ƒf�l�l�����Ă��܂��[���̗ǂ���͐j�����낵�����_�ł̓A�[�����܂��������ɉ��肽�Ƃ��Ă��A�j�͓����������͊O���ɒe����邱�Ƃ����遁���C����������O�ɃW�����v�����؋��ł������̂悤�ȓ���͐j�����낷�Ƃ��ɃA�[����e�G�Ɉ������s��ۂŋN���邱�ƂȂ̂Œp�����������Ƃł����B�B�B
���̓C���T�C�h�t�H�[�X�̎��Ԃ͏�L�̂悤�ɃA�[���̌Œ�I�t�Z�b�g�p�ɂ����̂ł͂Ȃ��A�e�n�_�ł̍a�ǂɑ��Ē��p��Tracking Angle�ɗR������̂Ŋe�a�a�ŏ�����������Ă��܂��B���̓A�[���̃I�t�Z�b�g�p���傫����C���T�C�h�t�H�[�X���傫���Ƒ����_���Ă��܂������A�V�F����Őj��̐����p�x���ǂ̂悤�ɒ������Ă��A�[���x�_�ʒu�E�I�[�o�[�n���O��ς��Ȃ�����̃A�[���́iTracking Angle�R���́j�C���T�C�h�t�H�[�X���͕̂ς��܂���B�����A�[����I�[�o�[�n���O�����Ȃ��A�[���ł̓C���T�C�h�t�H�[�X�����ȖڂȂ悤�ł��B�I�t�Z�b�g�p�Ƃ͊W�Ȃ��̂ł����A�A�[���̃I�t�Z�b�g�p�̓G���[�p�͈̔͂����Ȃ��Ȃ�悤�ɐݒ肷��(�A�[���x�_�ʒu�E�I�[�o�[�n���O���œK������)�킯�ŃI�t�Z�b�g�p�̂��镁�ʂ̃A�[���̃C���T�C�h�t�H�[�X��Wµsin(�A�[���̃I�t�Z�b�g�p)���G���[��0�n�_�̑�\�l�Ƃ��č����x���Ȃ��̂ł��B
���莮�̃C���T�C�h�t�H�[�X�L�����Z���͓͂����ŏ��Ȃ� �O���ő����|����܂��B ������l���i�܂���SME�̈ӏ�������ājSAEC��WE-308�͓����g���[�X�d���� �����ŏ����j���𑝂₵�X�ɐ����g���b�N���[���n�_������ɐ݂��Ă���炵���B�T�G�N�̎����C���͊O����90�x�ł��������ł͉s�p�ɂȂ蕪���d�ʕ��͂��j���ɉ������܂��BSME�̓c�m���A�[�������番������Ă���̂ł����͂Ȃ�܂���B�������Ɋ֗^���Ȃ��悤�Ƀc�m��ݒu���Ă��Ȃ����́A�A�[���̏㉺�����A���`�X�P�[�g�@�\�ɍ�p���g���[�X�ɉe����^���邱�Ƃ������悤�ł��iAT-1005II�Ȃǂ͐������̉�������Ƀo�C�A�X�o�[��ݒu���鍇���I�Ȑv�ł����j�B
80�N�㏉�߃I���\�j�b�NSG-2�Ƃ����T�C�h�t�H�[�X�����a�Ń`�F�b�N����ʔ����A�N�Z�T���[������܂����B�J�[�g���b�W�̌`�����Ă��ď㕔�̃��[�^��[�A���`�X�P�[�e�B���O�������g�p���R�[�h�Œ��ڂł���]�Ƃ��낪�~�\�B�ېj�QR/�ȉ~�j�Q�d/���C���R���^�N�g�j�Q�k�ƌ����j�܂ő����Ă��������ł��B�Ƃ��낪���ۂɎg�p����j�̌`��Ɠ����łȂ���Η]�萸�m�Ƃ͂����܂��A�ǂ̃��R�[�h�łǂ̂������[����]���邩�̓��[�U�[�C���ł��B
�莝����SME 3009 Imp�̃A�[���Ōv�Z�����}�������܂��BSME�̂��̃A�[���ł̓r�j���̖��C�W���ʂ̏����0.4�ӂ�ɑz�肵���v�̂悤�ł��B�o�C�A�X�ڐ��ƃA�[���ɂ�����C���T�C�h�t�H�[�X���Ή����Ă��܂��i���C�W���ʂ�0.3�ɂ����ꍇ�͊O��Ă��܂��܂����j�BY���̒l�͐j�̈ʒu�ł݂��A�[���̉�]�͂ł��i��*W*sin���j�B�J�[�g���b�W�̃_���p�[�͂��̌v�Z�ɓ����Ă��܂���B㊟�R�{���̖{�ň��p����Ă���r�j�[���̖��C�W���̕��ϒl��0.3�͉��a�ł͂Ȃ����ʂő��������̂��H�j���i�v�j�͉��ǂɑ��Ă��ꂼ��1/��Q�ɕ�������邪�A���E�̕ǂ����邩���*W�̕����͂Q���i�P/��Q�j��*W����Q��*W�ɂȂ�A�Ƃ����_�|���h�C�c�̃T�C�g�i�`�`�`�j�̋G����analog aktuell��3/200�P�œǂ݂܂����B1970�N2����HFN���̋L��"frictional drag and bias compensation" by Snell and Rangabe�ł����l�B����Ɩ��C�W���̎����l�̕��ς�0.3x1.414��0.424�Ƃȃ��܂��B����SME3�O�����V���[�Y�̃o�C�A�X�͂����Ɛݒ肳��Ă���悤�ł��B�ڂ�����SME3009 imp�̓����������������B�O�������̕ω��Ō���ƃC���T�C�h�t�H�[�X�ƃL�����Z���[�͂� �݂��ɋt�����̕������ɂȂ�B ���قǂœ����ڐG����ݒ�ł͓����ƊO���ō����傫���Ȃ� �[�S�̂ɂ͏��Ȃ߂̃o�C�A�X�B ���ʂ̐ݒ�̓L�����Z���[�͂̕��������������g�� ���_���O���ɒu���B ����ƍœ����̕����������đS�̂ɑ�ڂ̃o�C�A�X�ɂȂ�B
�����A�[�����C���T�C�h�t�H�[�X�E�L�����Z���[���͂������ꍇ�̍��E���ǂɂ�����j����LW/RW�̐}�������܂��B�r�j���̎������C�W���ʂ͗}���ڂ�0.3�Ōv�Z���܂����i0.4�ł͔䂪�ꊄ�傫���Ȃ�܂��j�B���`�����l���ɂ�����j���͉E�`�����l���Ɣ�ׂčő�1.3�{�ɂȂ��Ă��܂��B����͎�����9�C���`���x�ŕ��ʂ̃I�[�o�[�n���O�̃V���[�g�E�A�[���ɋ��ʂ���l�ł��B12�C���`���ƍő�1.2�{���炢�ł��B�V���[�g�A�[���ł�SAEC�@308�V���[�Y��5mm�̃I�[�o�[�n���O�ł͒����A�[���Ɠ����ɂȂ�܂��B�A�[���ɂ������]�͂̓�*W*sin���Ōv�Z���܂������A���a�ǂɂ�����T�C�h�t�H�[�X�̓�*W*tan���@(���a�ǂɒ��p�����R�[�h�̒��S�Ɍ������āj�Ōv�Z���܂��B�V���[�g�A�[���ł�15%�����͂������E���͂��Ⴍ�Ȃ肻�̌��ʁA�j��������30%�ɂȂ�܂��B�j����ς��Ă����̔䎩�͕̂ς��܂���B���̖͎��}�͌Œ�I�t�Z�b�g�p��Tracking Angle�ƈ�v�������i�G���[�p���O�j�̂��̂ł��B
�a�Lj���tan�ƃA�[����]��sin�̈Ⴂ�ɂ��Ă�tetsu���̑f���炵���y�[�W�����������B�@
http://web3.incl.ne.jp/tetsu/c8dekirukana/armgmt.html�@�a�ւ̈���side
pressure�Ƃ��̔���p�̗͂�1.�Ő������Q.�ł�Skating
Force�Ƃ��ăA�[���̉�]�͂Ɍ��y����Ă��܂��B����Skating
Force�Ƃ����p��Ɉ�a���������Ă��܂������A�a�̖����Ƃ���ɃA�[�����~�낵�����A�����ʂ�skating����ꍇ�ɂ��čl�@����Ă��܂��B�A�[���̓����y�ъe�x�N�g�����A�j���[�V����������Ă��ăI�t�Z�b�g�p�̖���PSA�̗L�����ɂ��Ă��������Ă��܂��B���ۂɂ�stylus
drag�ɂ��e���V�����̕ω�����Vertical Tracking
Angle���������j��ɂ͉�(side force)�Əc(�����j���̕ω��j�̑o���ɗ͂������܂��i�J���`���o�[�̏c����]�j�BPSA�̏ꍇ��stylus
drag�ɂ��J���`���o�[�̉������ւ̗͂̉e���͂���܂���[���m��������PSA��������O���������R��������悤�ȋC�����܂��Bstylus
drag�y�і��C�͂͐j���ɔ�Ⴗ��̂Ōy�j���̃J�[�g���b�W���]�܂�܂����A�y�j���p�J�[�g���b�W�͊T���Ă��̃R���v���C�A���X������stylus
drag�̉e�����₷���BWell-Tempered�̃A�[��(���݂�{�t���[�g�j������Firebaugh�͐j��ƃA�[������Ԃɓ����e���V������a�炰�邱�Ƃɂ��stylus
drag���������Ƃ�ڎw�����悤�ł��iUSP4792938-1988�j�B�d��܂��܂ȃA�v���[�`��������̂ł��B���a���͂ƃA�[���ւ̉�]�́i*��)���{�Ɨ��̂悤�ȑ��֊W�ŁA�P�ƂŐ����Ă���̂ł͂Ȃ��B���̊W�̓A�[���̉�]���[�����g(���ݓI�ȉ�]�́j���a�Lj��́@x�@COS(tracking
angle)�Ƃ������܂�(TAN�Ɓ�COS��=SIN��)�B�a�Lj��͂ƃA�[����]�͂͂��݂��̃x�N�g�������œ����܂��B���́��ǂ̎��_�Ō��邩���Ȃ̂��A�[�����������������@(Gilson�̐}�ɕ�M�j�����藧���܂��B
���F�I�t�Z�b�g�p�̂���A�[���ł͐j�J���`���o�[�̓I�t�Z�b�g�p���Ȃ����Ď��t�����Ă���̂ŁAstylus
drag�ɂ��e���V����(�j��-�A�[���x�_�ԁj�ɂ���Đj�悪�I�t�Z�b�g�p����������������ɋ��Ȃ���B�����PSA��Ԃɋ߂��Ȃ�[������A�[���������ɉ�]���ča�������Ă���悤�ɂ�������B�L�����Z���[�͂���������ƃJ���`���o�[�͓����ɋȂ��邱�ƂɂȂ�킯�ł��BPSA�̏ꍇ�Astylus
drag�ɂ��j�悪�a�ǂ���̔����͂��Ă��A�j�J���`���o�[�̉�������ɃA�[���x�_������1�{�̒����_�Ƃ݂Ȃ���̂ł��̓����e���V�����ɂ��J���`���o�[�̓��O�Ȃ��肪�������Ȃ��B�����⌷�̂悤�ɒ��͂ɂ���Ĕ����̉�������̂�����B
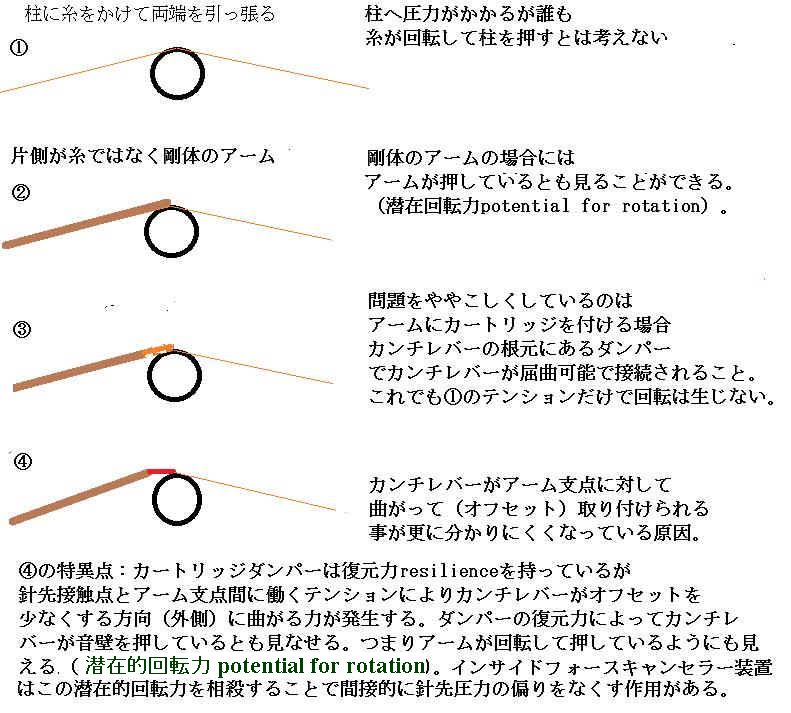
inside force�Ƃ����p������̑Ώۂ��a�Ȃ̂��A�[���Ȃ̂�����������₷���BP.Wilson��The Gramophone Handbook(1957)�ōa����SIDE PRESSURE�ɂ��Ď��̂悤�ɏq�ׂĂ��܂��ioverlap=hang over)�G "The force due to friction is on the average tangential to the mean line of the groove. It is balanced partially by stress in the carrying arm (which refuses to be deformed) and partially by side pressure between stylus and groove. As already noted, this side pressure increase the more the stylus is made to overlap the spindle..." ���̏ꍇ�̃A�[����stress�͐j��ƃA�[���x�_�ԂɊ|��������e���V�����̂��Ƃł��Binside force canceller���u�̖��̂ƍ\�������A�[���������]���邩�̂悤�Ɍ���������^���܂��B���̑��u�̓A�[���ɔ����v���̉�]�͂�^���邱�Ƃɂ�����a���͂̕�side pressure�����炷���߂ɂ����̂ł��ˁ[���͌�����Ă���܂����i�{���]�|�j�B���낢��S����e���V�������Ă��钆�Őj�͉��a�ɏ]���ċ����U������������킯�ł��[�������z�Ɏv���Ă��܂����i��
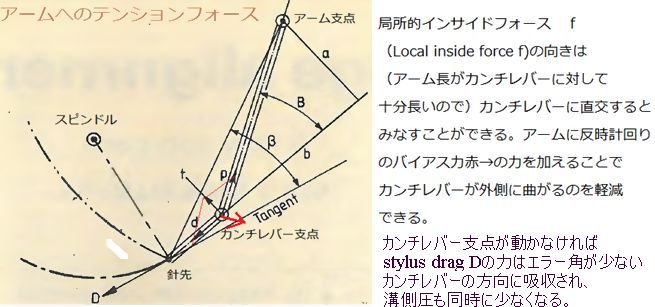
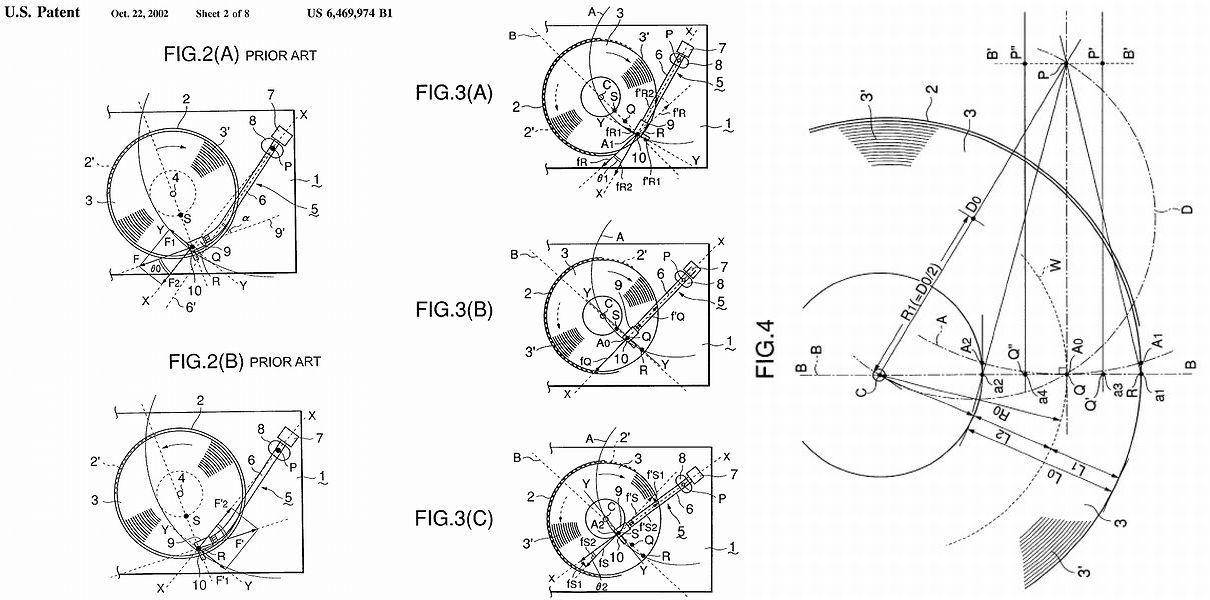
�I�t�Z�b�g�p�̂Ȃ�PSA (pure straight arm)�̖͎��}�BSide Force at stylus is irrespective of arm's (fixed) offset angle ���f, but always follows tracking angle �� to make tangential to groove. �� value for 9inch arms (23cm) with normal overhang & offset is changing between 21-25 degrees within groove radius (6-14.5cm) to be played on. �� value for 12 inch arms (30cm) with normal overhang & offset is changing between 16-19 degrees. Hence 23 & 17.5 degrees or around as intermediate values are usually selected as fixed offset angles ���ffor 9 & 12 inch arms respectively. With pure straight arm (PSA) without offset angle, side force is corresponding with the error angles=tracking angles. Tracking angle of PSA (20cm) is varying within +/- 13 degrees with 20mm short to spindle centre(=underhang): null point groove radius around 92mm. Hence the absolute value of side force at PSA is smaller (roughly half) than at offset arms when arms with same effective length are compared. �����������Ŕ�r����ƁAPSA�̃T�C�h�t�H�[�X�iinside&outside)�͊p�x���̐�Βl�ɔ�Ⴗ��̂ŁA�I�t�Z�b�g�̂���A�[����alignment�iOverhang)�ɂ��C���T�C�h�t�H�[�X�̔����߂��ɂȂ�܂��B���̏ꍇ�̃T�C�h�t�H�[�X�Ƃ̓A�[���̉�]�ł͂Ȃ��A�j�����E�̍a���������͕��������ꂼ��C���T�C�h��A�E�g�T�C�h�ƂȂ��Ă���ƍl�����܂��B���̂悤�ȃA�[�����x���������̂d�����������l�����悤�ȃL�����Z���[���g�p�\�ł����������Ă��܂���B�O��ɉ�]����Scratch Play�p��Vestax��PDX-2000���iA.S.T.S.=anti skipping tonearm system�j���J�����ꂽ�w�i�́F�g���b�L���O�G���[�p�����g���b�L���O�p�R���̃T�C�h�t�H�[�X�̌�����D�悵�I�t�Z�b�g�p�̖����X�g���[�g�A�[���ƃA���_�[�n���O��I�������悤�ł��i�č�����6469974�|2002�j�B
�p��WIRELESS WORLD 1981�N10�����iP.60)�ɂ�GILSON��STYLUS DRAG�̌`���v�f�Ƃ��Ĉȉ��������Ă��܂��B
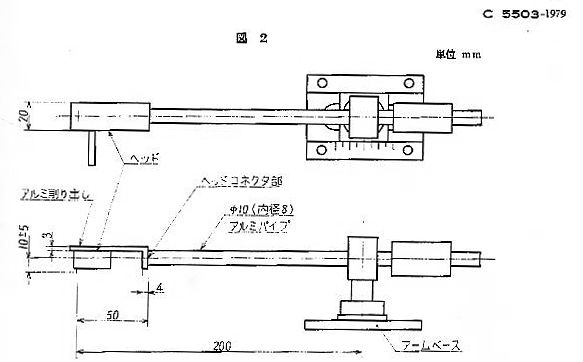
������������Ƃ��邩��͔����ł��B �������i�j��Ɛ����̃��x���ő�����effective lateral length)���A�[���x�_�̐�������j���܂łł������ۂɂ̓X���b�g�̂����V�F���ɃJ�[�g���b�W�����t����ʒu/�J�[�g���b�W�̎��t��������j��܂ł̒����ȂǂŃA�[���̒����͕ς���Ă��܂��܂�(���A�[���̍��������ł��͂��ɕς��j�BIEC�ł͏���̐j�����|������ԂŁA�J�[�g���b�W�̎��t�����Ɛj��̋����F9.5mm�}1mm�𐄏����Ă���̂ŁASME/Shure�ɋK�͂�����Ă���̂�������܂���(�K�i�ƌĂׂȂ��K�i�j�BSME/Shure�̕W���V�F��+�J�[�g���b�W�Ŏ��t��������9.5mm�̓V�F���R�l�N�^�[�����5cm�ɑ������܂��i���\�Q�Ɓj�B��6cm�̓���V�F�����t���Ă���CEC�@HA-937�̎������̓V�F���R�l�N�^�[����5cm�̂Ƃ����229cm�Ƃ��Ă��܂��B�����JIS�@C5503�|1979�i1995�N�p�~�jPhonograph�@pick-ups���������J�[�g���b�W����p�A�[��(������200mm��PSA�ŃV�F���R�l�N�^�[����j��܂ł�50mm�j�̐}���ڂ��Ă��܂����[<�g���b�L���O�G���[��2�x�͐j��ɂ�����}�V�~���̈ړ��i�O��j���Ӗ�����>�Ƃ���<�A�[���x�[�X����500g�́A�A�[���̎������ʂ̖�Q�O�{>�Ƃ���܂��̂ŁA�A�[�����x�[�X��X���C�h�������đ��肵���悤�ł����A�g���b�L���O�G���[�͑��荀�ڂɂ���܂���B
| ALIGNMENT OF CARTRIDGE ON DETACHABLE SHELL | |
| Centre of mounting holes of cartridge to stylus tip (Shure/IEC) | 9.5mm�}1mm (3/8inch) |
| Centre of mounting holes on shell to shell connector (SME) | 40.5mm�}1mm (1 19/32inch) |
| Pick-up Head Length (stylus to shell connector) | 50mm�}2mm (1 31/32inch) |
�L�����Ƃ������t��1980�N������Arm Distance(�A�[���̎����S����^�[���e�[�u���X�s���h�����S�j�̈Ӗ��œo�ꂵ�܂����iArm Distance=Effective Length - Overhang) �B�Ƃ��낪���t�̈Ӗ�����������Ǝ��Ⴆ�₷���B�����������̍�Arm Distance�̈Ӗ��Ŏg��ꂽ��L�q�̕s��vBabel���n�܂�܂����B���L�������Ƃ������t�̓����͕s�K�ł����B���̕��Q�͓����̃J�^���O�̑����ɊԈႢ�����݂܂����B�Ⴆ��Stax UA-7�̎�������SS�̃X�e���I�K�C�h'76�ł�240mm�A��'84�ł�227mm�ƂȂ��Ă��܂��i�I�[�o�[�n���O�͂ǂ����13mm�j�B��҂̓��[�J�̌����L�����iArm Distance)���������ɂ��Ă��܂����̂ł��B���̂��ߊC�O�ł�SS�Ȃǂ̋L�q�ɉe������ē��{�̃A�[���̂������ɂ��ē����ԈႢ�����Ă��܂��BORTOFON�͗L�����̂ق����A�[���̃��f�����Ɏ�����Ă���悤�ł��B���t�Ƃ��Ă͂ǂ���ł��ǂ��̂ł��i�ꕔ�̃��[�J�[�͈�т��ėL�������������̈Ӗ��ō̗p��Arm Distance�̓e���v���[�g�Ŏw�肵�Ă���悤�ł��j�BArm Distance�̓A�[���𓋍�/�ݒu���鎞�ɂ������ӂ���Ηǂ��̂ł����炱�Ƃ���L�����Ƃ����T�O�������o���̂ɂ͎^���o���܂���B�A�[���̌���������ɓ����Ƃ��ɂ�Arm Distance�������A�[���͌����\�������������ł��i�v���[���J�o�[������ꍇ�ɂ̓A�[���̃J�E���^�[�o�����X���̒������l���ɓ���Ȃ��Ǝ��[�ł��Ȃ����Ƃ�����j�B��L�F���͗L�����Ƃ����͔̂�r�I�V�������t�Ǝv���Ă��܂������A�Ɩ��p�A�[���̐��E�ł�1960�N������Arm Distance�̈Ӗ��Ŏg���Ă����悤�ł��B�����Ӗ����`�������Ȃ����[�J�[�̋L�q�͎~�߂Ăق����Ǝv���܂��iOverhang/Distance/Effective Length�̎O�_�Z�b�g�����������ł悢�̂ł��j�B���������䂶�Ⴀ��܂��Ɂu���s���v�Ƃ����\�����݂��܂�(�ϊ��~�X�ɗR������Ǝv����̂ł�����Ⴊ����ƊԈႢ���Ƃ�������邱�Ƃ͂悭����܂��j�B�蔲���ŏ\���Ȑ�����}�ʂ������Ȃ����[�J�[�������B�]�_�Ƃ̃��r���[�ł����e�̂Ȃ�write-up����ŁA�G����ǂނ̂��~�߂܂����B�G���̖ړI�͒��C�ȓǎ҂���������ɂ�����(�[���l�������Ȃ��j�����̂悤�Ɋ����Ă���Ȃ̂ł��B���̂悤�ȎG�������߂�̂͂�����ɁB
�f���I���̃J�[�g���b�W�̃I�}�P�ŃQ�[�W�����Ă��܂����B�J�[�g���b�W���V�F�����ƌ������Ă������g���b�L���O�G���[�����Ȃ��Ȃ�悤�ɐj�̎��t���ʒu�𑵂��܂��B�V�F���Ɏ��t�����j�̈ʒu���R�l�N�^�[�������瑪��̂ł���50mm�n�_�̑O���1mm���݂�3�{�����݂������Ă��܂�(38mm�̐��͓���R�l�N�^+�I�t�Z�b�g�t���V�F�����g�����I�[�g�v���[���[DP-47F�p)�B�����CEC��Stylus Position Gauge�Ȃǂ��݂�ƃI�t�Z�b�g�p�ɊW�Ȃ��V�F����̐j�̈ʒu��50mm�Ƃ��ăA�[���S�̂̎������Ƃ���l�������肻���ł����ALP�W�ł�RIAA�ȊO�͓���K�i���Ȃ��悤�ł��B���̉摜�ɂ���I�[�f�B�I�e�N�j�J�̃Q�[�W�͂܂��������X�s���h�������Overhang���𑪂�̂ł����A�V�F���̃��C���ł͂Ȃ��A�[���̎x�_�����Ɍ����Ȃ��Ɛ��m�ł͂���܂���B���ۂɃA�[�����I�[�o�[�n���O���Đj������悤�Ƃ���ƃX�s���h�����ז��Ȃ悤�ł��B�ꕔ�̃A�[���͉������̉��͈͂��������ۂɂ̓I�[�o�[�n���O�ł��Ȃ����̂�����܂��B���ɃA�[�������ڂ���Ă���v���[���[�V�X�e���̏ꍇ�̓V�F����ŏ���̐j�ʒu���m�F���邱�ƂŐv�ʂ�̎������y�уI�[�o�[�n���O�ƃI�t�Z�b�g�p�ɂȂ�܂��B�j�ʒu��O�コ����Ǝ����������łȂ��I�t�Z�b�g�p�����������ς��܂��B

�p�C�v���Ȃ����A�[���ŃI�t�Z�b�g�p��SME�̃T�C�g�ɂ���悤�ɏ����_�ȉ�3���܂ő����鎖�͎��ۂ͕s�\�Ȃ̂ł͂Ɗ����Ă��܂����B���̋^�O���u���C�A�����ɂԂ�����ނ������Ă���3009R��SME��Protractor�ɍ���Ȃ��ƕ�����܂����B�X�C�X��Breuer�^���̏ꍇ�A���H��̃A�[�������������͂炵�Č�����Ă���̂ŏo�א��i�������Ȃ��Ƃ������܂����B��̌^�X�g���[�g�E�A�[���̏ꍇ�A���V�F���l�b�N�̂Ƃ���Ŋp�x���o���Ă���̂ł��̐��x�͂����Ǝv���܂��BSME�̏ꍇ�̓I�[�o�[�n���O���w�肹���x�[�X�v���[�g��̃A�[�����̂̈ړ���Arm�@Distance��ς��邱�Ƃ�Protractor�ɍ��킹��Ƃ����̂͐�����H�덷���瓦����p�����̏�肢�i�Y���C�j�d�|����������܂���B
SME 3009���̃��e���������ɂȂꂽ�ڂɂ�MICRO��MA-505�̐����x�A�����O���̊O�ɕt���Ă���E�G�C�g�̓��������ЂƂ����ł��܂���ł������A�ŋ߂���Ƃ킩��܂����B ��ʂɃ��e�����o�����T�[�́��p�C�v���Ȃ����Ă��镔���ƃJ�[�g���b�W�̏d�S�ʒu�Ȃǂ̂��߂ɃA�[���S�̂̏d�S�ʒu���j��ƃA�[���x�_�����Ԓ������牡�iLateral)�ɂ���A�A�[�����X���Ď��t�������A�����x�A�����O�ɍ�p���ăA�[�����������ɉ�]����͂���̂�h�����̂��ړI�ł��B�A�[���̏㕨�i�����j�̏d�S�������x�A�����O�̒��S�ʒu���牡�ɑ傫������Ȃ���Ηǂ��B�O�o�����X�Ŋm�F�ł���O��o�����X�ƃ��e�����̍��E�o�����X�͒��p�������Ȃ��Ă��A���̊m�F�͂ł���̂ŁA�����ʓ�����̃o�����X���x�_�Ŏ��Ă���Ηǂ����ƂɂȂ�B�O��O�o�����X���������ԂŃA�[������X���Ă��A�[����������Ȃ��悤�Ƀ��e�����������邩�A�V�F���̓��ɐG��ďc�ɐU�q�^�������Ă����ɂ���Ă����Ȃ���Α��v�B�j���ƃA�[���̐������x�ɂ���邪2�x�ȏ�A�[���E�v���[���[�䂪�X���Ă��ă��e�����o�����X�����ɂȂ邱�Ƃ͎��ۂɂ͂��蓾�Ȃ��ݒ����낤�BS���^�A�[���̑����Ƀ��e�����������Ȃ��̂����Ȃ�����BS���^�A�[���̃J�E���^�[�E�G�C�g�����炷�����͐j�Ǝx�_�����Ԓ������琔�x����Ă�����̂������BS����JELCO�@SA-250�ł�3.5�x���x�J�E���^�[�E�F�C�g�V���t�g���Ȃ����Ă���BMICRO MA-505�͐j��ƃA�[���x�_�ƃJ�E���^�[�E�F�C�g�V���t�g���꒼���Ȃ̂ŃA�[���̋Ȃ��������̏d���ƃJ�[�g���b�W�̂��K�Ƀo�����X���邽�߂ɔ��Α��Ƀ��e�����o�����X�E�G�C�g��u���d�g�݁B���݂�Denon DP-7F�͌������̓X�g���[�g�p�C�v�̃A�[�������ڂ���Ă��邪�J�[�g���b�W��t���ɃI�t�Z�b�g������j�ƃA�[���x�_�ƃJ�E���^�[�E�F�C�g���͒����ɂȂ��Ă��Ȃ��i�J�[�g���b�W�̂��K�̏d���ɑΉ����镪�A�j�悩��A�[���x�_������ƃJ�E���^�[�E�G�C�g���������Ȃ����Ă���j�B����͋ߔN��SME�̃X�g���[�g�p�C�v�̃A�[�������l�ł��B�����X�����Ȃr���A�[���Ȃ̂����A�p�C�v�̋Ȃ��肪�Ȃ������ŃX�g���[�g�Ɣ��f����邱�Ƃ������B
�Ƃ���ő傫���p�C�v���Ȃ������A�[�����C�O(��ɕč��j�Ŕp�ꂽ���R�͕ʂ̂Ƃ���ɂ���悤�ł��F�w�b�h�V�F�������^�C�v�̓w�b�h���d���Ȃ肪���Ȃ̂ł��������āA�p�C�v�̓X�g���[�g�ɂ��Œ�V�F���ɃJ�[�g���b�W�����t���w�b�h���y�ʉ�����Integral arm�^�C�v��1970�N��㔼����̌X���ł��B����ɑ��ăV�F�������^�C�v��Universal arm�ƌĂ�唼���r���^�ł��B�ꕔ�̐��i�̓I�t�Z�b�g���t������������V�F���{�X�g���[�g�p�C�v���̗p���Ă��܂����悪�J�N���ƋȂ����Č������I�łȂ��炵�����Ȃ��B�������~����Ă���Ortofon SPU���Ĕ������ꂽ�̂����{�̃}�j�A�i�d���A�[���w�b�h���D���ŁA�J�[�g���b�W���ȕւɌ������Ċy���ޕ��y�j�ɐG�����ꂽ���炾�����ł��B�y�ʉ��A�[���̗D�ʂɂ��Ă�P. Rother "The Aspects of Low Inertia Tone-Arm Design" JAES Vol.25, (Sept.1977)�⓯�NB&K�̕�Audible Effects of Mechanical Resonances in Turntables�Q�ƁB����ł�������n�D�͉Ȋw�z�����Ǝ������܂��B�D��(taste)�̐��E�ł�����ˁB�ғ��𗎂Ƃ����X�������D�����O���}�[�̂ق����D�݂��H�A�[���w�b�h�̌y�ʉ���}��1983�N���d��3g�ȉ��̃J�[�g���b�W���\�j�[��I���g�t�H�����甭������܂��������{�ł͌�����������܂���ł����B�J�[�g���b�W�����y�����Ă��d���w�b�h�V�F���ő��E����Ă��܂��A�V�X�e���Ƃ��Ă̌y�ʉ��ɂ͂Ȃ���Ȃ������B�������a������T4P�v���O�C���^�C�v�E�J�[�g���b�W�i���d��6���j�͎�Ƀ��j�A�g���b�N�@�ɍ̗p����{���I�Ȍy�ʉ��i�j�悩�猩���A�[���̎�������10g�O��j���������܂�������������������܂���ł����BT4P�J�[�g���b�W��j�A�g���b�N�����ݎ嗬�ł͂Ȃ��ł��ˁBT4P�V�X�e���͖��ʂȁidead mass)�V�F�������Ȃ��R�l�N�^�[�ɑ}�����݈�g�̃l�W�ƃi�b�g�ŌŒ肷��̂ōŌy�ʂɂȂ�܂��B�y�ʉ��̃����b�g�F�@�������ʂ����Ȃ��̂ŔՂ̕ΐc��[�v�ɑΉ��ł���A�n�C�R���v���C�A���X�i���y�j���j�J�[�g���b�W�ł���拤�U���P�OHz�ȏ�ɂȂ荬�ϒ��c��}������B���݂��̕ł̖`���ɂ���悤�ȃV�X�e���͕��u�ɕۊǂ��g���Ă���܂���BDenon DP-�VF�i���j�A�g���b�N�ł͂Ȃ���T4P�V�X�e�����̗p�����c�c�I�[�g�V�X�e���j�œ��X���R�[�h���y����ł��܂��B�Ȃ邾���@�B�ɐG�炸�A���y�ɐZ��邱�Ƃ���тƂ��Ă��܂��iLife is short and time fleeting�j�B�J�[�g���b�W�̒����ւ��������͎~�߁A�j��������I�Ɍ������Ă��܂��B�f�����b�g�i�H�j�͕��}�E�V���v�������ă}�j�A�Ƃ͌����Ȃ����Ƃł��傤���H
SME�̃i�C�t�G�b�W�͐j��E�x�_�����Ԓ����ɒ��������A���j�A�I�t�Z�b�g���Ƃ�����Ă��܂��B����ŃA�[�����㉺����Ɛj�悪�^�[���e�[�u�����S�����ɉ~�ʂ�`���܂��B����̓I�t�Z�b�g�p�̂��郏���|�C���g���ł������ł��B�����|�C���g�͐j��E�x�_�����Ԓ����ɒ������܂����A�㉺�ɂ��Linear Offset�̃��C�����X����Ǝv���܂�(���}�̉��z���𐅕��Ƃ��铮���j�B�V�����^�C�v�̃A�[����Linear�@Offset�̃��C��������(���C�����̂͐�����ۂ��Ȃ���j�����㉺������悤��offset line�̐��̕����Ƀx�A�����O���z�u����Ă��܂��B�I�����ɂ͂肻�̐悾���㉺����悤�ȓ����ł��BSME����|�C���g�̈ꕔ�ł̓A�[���̍������������V�F�������E�ɂ��X���̂ŃV�F���̎��t��������]�����o����悤�ɂȂ��Ă��܂��B�J�[�g���b�W�𐅕��Ɏ��t����������g���[�X��1mm�̏㉺��0.2�x���x�̌X���ʼn��ɈႢ���o��Ƃ͎v���܂���̂łǂ̃A�[���ł����Q�͂Ȃ��Ƃ������܂��B
���܂������Ă������ᎆ�iA4:21x29cm)�̏d���𑪂�����4.5g�ł����̂ŁA1cm�p�ɐ������7.4mg�ɂȂ�܂��B���̐ؕЂ��V�F���̐j�ʒu�ɍڂ��ăA�[���������x�A�����O�̏������x�𑪂��Ă݂܂����BMICRO��MA-505�Ŗ�3����22mg�ł������A�i�C�t�G�b�W��Infinity Black Widow(�V���R���o�X���O�����ꍇ�j�ł�1����7.4mg�ȉ��ɂȂ�܂���(1977�N�̃J�^���O�ł̓i�C�t�G�b�W�̐������x5mg�A�������x��10mg�ƋL�ځj�B������SME3009��20mg�ȉ���搂��Ă����ƋL�����܂��B�����̏d�ʐ��l�ł̓A�[�������ނ̂Ɏ��Ԃ�(���ɐ��b�j�����邽�߁A�A�[���̎��ۂ̐��\��\�������̂ł͂Ȃ��H�쐸�x�Ɠ����z���̌ł��������Ă��邾�����Ǝv���܂��B�A�[���̉^���͎��R�����ł͂Ȃ������ʂ������l�Ƃ��鍄�̐U��q�ŁA���̕������͊ȒP�ɉ����Ȃ��̂Ŏ��̓^�[���e�[�u������]���n�߂��Ԃɋߎ����čl���Ă��܂��B�Ⴂ�̓^�[���e�[������]������͂͂قڈ��ƍl������̂ɑ��A�[�����c��]����͂͂b�n�r�i�����ʂ���̊p�x�j�ō��X�ς��̂ł����A0.5�x�ȓ��̉�]�p�ł͂b�n�r�i0.5�x�j�͂P�ɋߎ��ł���̂��A�[���̏c��]�ƃ^�[���e�[�u������]���n�߂鏉����Ԃɂ͏\���ȑ��ւ�����ƍl���܂��i�����܂ł���]�p���\���������Ƃ��j�B�������j��(�́j���傫���قǑ����������A�����j���ł̓C�i�[�V���i�h���������k���k�@ma�̓J�[�g���b�W���܂߂��������ʁA�k�͎������j���傫���A�[���قǂ�����藎������B�^�[���e�[�u���ɒu�������čl����Ɠ�����O�̂��Ƃł����A�[���ƂȂ�Ƒz���͂����Ȃ��Ƃ����Ȃ��悤�ł��B�A�[���ɂ����铙�����ʂ̌v�Z�������A�[���̃y�[�W���������������B�����ȓ������ʂ͎��̓C�i�[�V������t�Z�����̂ł��Fma=I/L^2
�t�قŊԈႢ�����邩������Ȃ����A�[���ƃ^�[���e�[�u���̉�]�V�~�����[�V�����t�@�C���ikagensoku.xls)�����J���܂��̂ŋ���������Ȃ物�F�̃Z���̃p�����[�^��ւ��ėV��ł݂Ă��������B
�I�[�o�[�n���O��D�A�A�[����������L�A�����g���b�L���O�p����'�A �j�̃��R�[�h���S����̋������Ƃ����Ƃ� ��'��ASIN(0.5*��/L+L/��*(D/L-0.5*(D/L)^2))*180/PI()�B���邢�̓�'��90-DEGREES(ACOS((2*L*D+r^2-D^2)/(2*L*r)))�� ��'��DEGREES(ASIN((2*L*D+r^2-D^2)/(2*L*r)))�Ƃ��\���ł��܂��B�����̎��ɍ]�쎮�̃A���_�[�n���O�A����D�Ƀ}�C�i�X�l�����Ă��L���Ȃ悤�ł��B D, L�̒l�����߂�57�`147mm���X�v���b�h�V�[�g�̏c�̗�ɓ���ăV�~�����[�V��������a�a�ɂ���ĕω����������g���b�L���O�p��'���o�܂��̂ŁA�A�[�����ŗL�I�t�Z�b�g�p���Ƃ̍��������ꂪ���̒n�_�ł̐����g���b�L���O�p�x�덷�ɂȂ�܂��BTracking Angle��Arm Geometry�̒�`�͎���armdata�i�p���j�̖������������������B
�X���b�g�̂���V�F����ŃI�[�o�[�n���O���������̌덷�v�Z�̃V�~�����[�V�����ɋ����̂������overhang.xls�����Ă��������B�y�[�W���\�����ꂽ�炻���xls�t�@�C���Ƃ��ăZ�[�u���Ēu���A�������Ɓi�I�t���C���ł��j�A�[���̃V�~�����[�V������I�[�o�[�n���O�̍œK�l�Ȃǂ��v�Z�ł���͂��ł��B
�I�t�Z�b�g�p�ƃI�[�o�[�n���O�̊W�͂ǂ����Č��߂��邩?�@�����̃I�[�o�[�n���O��^�������̃g���b�L���O�p�Ɖ��a���a�Ƃ̊W���ɂ��ĎR�{���̐}�ł��ڐA���܂��B�����̐}�����܂��Ƃ�����x�̃I�[�o�[�n���O��^���邱�Ƃɂ���ăg���b�L���O�p���قڈ��ɂȂ邱�Ƃ�������܂����B�Ⴆ�Ύ�����237mm�̃}�C�N����MA-505��D/L�l��0.06, ������/L��0.24�A�O����/L��0.62�Ŗ�20.5�`24�x�͈̔͂ăg���b�L���O�p���ω����܂��̂ŁA����D/L�l�̏ꍇ��21.5�`22�x�̌ŗL�I�t�Z�b�g�p�������������ƂɂȂ�܂��B�A�[���v�Z��ł�JIS�Ɋ�Â���������57.6�����A�O������146.5mm�Ƃ���r/L���v�Z���܂����B
���ۂ̃A�[���v�Z��F�e���l�͊T���ł��B
| Samples of arms | Offset(approx.) | L | D | D/L | r/L range from to | |
| SAEC�@WE-308 | 12�� | 240mm | 5mm | 0.021 | 0.24 | 0.61 |
| MICRO�@MA-505 | 21.833�� | 237mm | 15mm | 0.063 | 0.24 | 0.62 |
| AT-1501III | 18�� | 285mm | 12mm | 0.042 | 0.20 | 0.51 |
| AT-1503III | 21�� | 257mm | 15mm | 0.058 | 0.22 | 0.57 |
| ORTOFON RMG-212 | 23�� | 228mm | 16mm | 0.070 | 0.25 | 0.64 |
| ORTOFON RMG-309 | 16�� | 320mm | 11mm | 0.034 | 0.18 | 0.46 |
�����g���b�L���O�덷�ɂ��s�[�N�c�iSecond Harmonic Distortion)�̌v�Z���͂��i���x�U��)*TAN(error in radian)/V(�����x�j�B100/3��]�̂k�o�̏ꍇ��vTAN(e)/�i2p��*100/3/60�j�B10�x�ȓ��̃G���[�p�ł�TAN(e)��SIN(e)��e�Ȃ̂ŁA�p�x�����W�A���ɒ����̂�p/180���|�����(1/200)*��*e(degree)/r�ɒP��������܂��B�Ⴆ�Av=100mm/sec�Ƃ���Θc��(�S����)��ABS(50*�G���[�p/�a�ar)�ɋߎ����܂��B�����O�������G���[�p�x�ł��������̘c���傫���Ȃ闝���ł��B
�����ƓO��I�ɒ��ׂĂ���l�B���C�O�ɂ��܂����B�u���C�A������2�̋L���͐����g���b�L���O�덷�Ɍ��肵���A�[���̐v�@�̗��j�������_���ł��BLinear Offset (Null Points�̒��_)�Őv����SME�̎�@���ǂ�������܂��B http://www.audioasylum.com/audio/vinyl/messages/62571.htmll�@(Part 1) ��http://www.audioasylum.com/audio/vinyl/messages/62570.htm (Part 2)�B �A����IEC����̕s�K�Ȉ��p�i�œ���60.325�ƍŊO��146.05�j������܂��B
1924�N�p����Percy Wilson��The Gramophone�Ɋ�e�����_���Ɏn�܂�A1938�N�X�E�F�[�f����Loefgren
(KTH=�����Z�p�@�Ŗ�������̎�C����)�������Ȑ��w�I��@���Akustische
Zeitschrift�ɔ��\���A1941�N �č�The Brush Development��Baerwald
��Journal of the Society of Motion Picture Engineers�i=SMPTE�̑O�g)�ɔ��\���A1945�NShure Brothers�̎�C�Z�tBauer��ELECTRONICS���ɘ_���\���Ă��܂��B�ǂ��SP����̘_���ł��̂ŁA���݂̘_�|�Ƒ����̂��ꂪ����܂��B
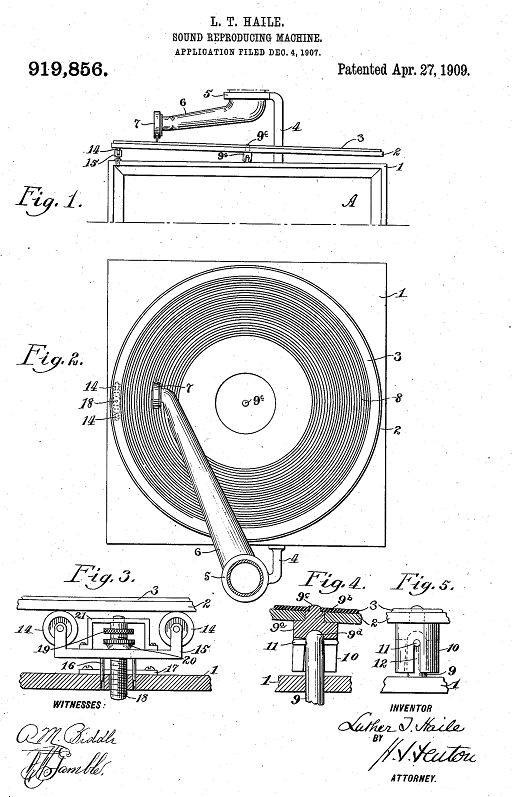
����(SP����j�͐j����30g�ȏ゠���āi�A�[�������x�������Ă��x�Ⴊ�Ȃ��j�A���`�E�X�P�[�e�B���O���u�͂���Ȃ������[�C���T�C�h�t�H�[�X�̓X�p�C�����a���A�[���������Ƀg���[�X���鏕���ƂȂ�A�Ƃ����ӌ��܂ł������悤�ł��B�Ⴆ���č�����919856-1909�ł͓����ɐj��i�߂�⏕�Ƃ��ă^�[���e�[�u�����X���A2277344-1940�ł̓I�t�Z�b�g�p�̂Ȃ�PSA�̃A���_�[�n���O�ݒ�ɂ����ē������̃A�E�g�T�C�h�t�H�[�X�ɑΉ����邽�߂ɍœ������Ɏ��Ńo�C�A�X���|���Ă���B
�a�ɂ�鑗��s�b�`���x�͉�]���x�ɔ�Ⴗ��̂�78��]�r�o�a��Lead-out�a�ő傫���Ȃ�܂��[�k�o�y��EP�̍ő�lead-out
pitch���i6.4+/-3.2mm�j�͂��̂��Ƃ��l�����Č��߂��Ă��܂��[1964�N��IEC98�ł�Lead-out�s�b�`����6.4mm���鎞�͍a��(top
width)��76�~�N�����ȏ�ɂ���悤�������ASP�Ղ�Eccentric lead-out pitch�́}3.2�}0.4�o�ɗ}�����Ă���B���̔w�i�͂������ʂ͉��}�Q�ƁB�ʏ��LP��200degrees/s��]����̂ŕ���100grooves/cm�̃s�b�`��360degrees*100/200degrees����180�b��1cm�����ɐi�ށ˖�56㎛/s�œ����ɐi�ނ̂�spiral
tracing force(�����a�̑���ɂ���)�͖����ł���قǏ������B
| SPIRAL TRACING FORCE: simulation for stylus climbing up on groove wall when lead-out pitch groove encounters with concentric finishing groove. | ||||
 |
lead-out pitch 6.4+/-3.2mm per turn | LP (100/3rpm) | EP(45rpm) | |
| Max speed for pitch 9.6mm/turn | 0.53333333 | 0.72 | cm/sec | |
| Climbing height (approx.) | 1.5 micron | 2.7 micron | ||
| average music pitch�@100grooves/cm | 0.00555555 | 0.0075 | cm/sec | |
| The theory of potential energy: the climbing height is corresponding to the speed at the floor. | ||||
Stevenson�̘_��PICKUP ARM DESIGN�i1966�N�j�ł͓�������n�߂�����`��̐j�Ł�������g���[�V���O�c�͌������遄�Ɨ\���������g���b�L���O�c�̕��ɏœ_�Ă��悤�ł��B�J���t�H���j�A��w�̕����w���mJohn D. Seagrave��1956�NAUDIOCRAFT MAGAZINE��"MINIMIZING PICKUP TRACKING ERROR"�\���Ă��܂��B1980�NAudio Magazine: Tonearm Geometry and Setup Demystified��1987�NAudio Critic: Lateral Tracking Alignment Revisited (Maybe Your Overhang Is Wrong After All)���ɂ��ʏ�Stevenson�EBaerwald�ELoefgren�^�C�v�Ƃ������ނ��m�肵���悤�ł��BElison����Loefgren B�Ƃ����ď̂�1987�NAudio Critic�Ɋ�Â��Ă��܂��B���Ȃ݂�Loefgren (A)�͘c�̃s�[�N�l���ႢBaerwald type�Ɠ���ł��B�ŋ߂͘c�̕��ϒl���Ⴂ Loefgren (B) type (�ʏ�Loefgren type)�̐ݒ����������Ă��Ă���悤�ł�(�O���n���̈ꕔ�̃A�[���H�j�B����stevenson.xls�t�@�C�������������3�_�������c�ɂȂ�Ȃ��덷�ɋC�Â��܂����BDennes�̍ŋ߂̌����ł͉ߋ��̂ǂ�Equations�������ł͂Ȃ��ASolver���g�������͓I���@�ɂ���ē������ʂ���A�c�̖ʐς�����������Perfect Loefgren B�Ƙc�̃s�[�N�l������������Perfect Loefgren A�̒l��������Ă��܂��B���v�I���@�ɂ��A�v���[�`�̓t�����X��Seb���ɂ���Đ�s�I�ɂȂ���܂����i�s�[�N�c�ƕ��Ϙc�����ɒႭ����f�U�C����������܂����[�����ړI�ɂ���@�͈�ł͂Ȃ����ƂɂȂ�܂��j�B���w�I�ɂ͖ʔ����ۑ�ł������̈�����͈͂ł͂���܂���B�ނ�̎��݂ŕ����������Ƃ�Linear Offset��������Offset Angle��Perfect Loefgren B��Perfect Loefgren A�ԂňقȂ�̂�Overhang�����������Ă������ɂȂ�Ȃ����Ƃł��B������v�Z���������Ƃ��A���ۂɐݒ�ł���͈͂͌�q�̂��Ƃ��B���Ȃ̂ŁA�������Ęc�����Ȃ��Ȃ����Ɗ�����̂��萔����������̋C����(���Ȗ����j�̒��x�ł��B
���̃G���\�����ƃu���C�A�������i���ł�����ł��I�[�o�[�n���O15mm�ɂ��Ă��܂������ȁj���{�̃A�[���̐v���^�⎋���Ă��܂��B�ʏ�Baerwald�^�C�v�̐ݒ�Ƃ����Ă�����̌��ɂȂ��Ă���^���͈͂����݂�IEC�Ɋ�Â��Ă��Ȃ�(1958�N�̋�IEC98��s�K�ɓK�p���A������J��Ԃ��Ă���j�̂ŁA�ǂ������ǂ����ł����B�B�B
�����g���b�L���O�c�͉��a�̑��x�U����v=100mm/sec�Ƃ��Čv�Z���Ă��܂��B�}�C�N����MA�]505�͎�����237mm/�I�[�o�[�n���O15mm/�I�t�Z�b�g�p21�x50����21.833degrees (Linear Offset��237xsin21.833����88.14mm)�B�������������ς����ɃI�[�o�[�n���O17.5mm/�I�t�Z�b�g�p23.2�x�ɂ����x�������h�E�^�C�v�ƃI�[�o�[�n���O18mm/�I�t�Z�b�g�p23.2�x�ɂ������t�O�����E�^�C�v�Ƃ̔�r�ł�(�ǂ����Linear Offset ��93.5mm�j�BSME�̐V���f��R��VI/V�ō̗p����Ă���x�������h�E�^�C�v�͑S��Œ�c�i0�|�C���g�Ԃ̍ő�c�ƍœ�/�O���̘c�̍ő�c�l��������W���̏��3�_�������c���x���j�B���t�O�����E�^�C�v�͘c�̑��ʂ����Ȃ�������u�c�ʐρv����ԏ��Ȃ����c�̕��ϒl���Ⴂ���Ƃł��B�}�C�N���̃A�[����SME�̋����f���̃X�`�[�u���\���E�^�C�v�ɋ߂��A�œ����ɏd�_���������v�ƂȂ��Ă��܂��B�ʏ�Stevenson type alignment��7�C���`45��]��12�C���`�k�o�Ƃ̋��p�ړI���������߂k�o�̃o���h�͈͂��猩��Ɠ����d���Ɍ����邾���ł�(�œ����Ȃ�тɍŊO���������ɐݒ肷�邩�̖��ł��[EP�̉��a�̍œ������a��54mm�Ƃ�LP�̊O����146mm�Ƃ������AMA-505��SL-1200�̃A�[���ł�3�_�̍ő�c���قړ����ɂȂ�܂��j�B�I�t�Z�b�g�p�͌Œ�ł͂Ȃ�������(�V�F����̐j�̎��t���ʒu�j�Ɉˑ����܂��̂ŃJ�^���O��̃I�t�Z�b�g�p�͏���̎������ł̐��l�ł��B�]���āA�V�F����ŃJ�[�g���b�W��1.2�x�������Ɏ��t����Ɠ����ɃI�[�o�[�n���O��2mm����������Ώ]�O�̃}�C�N���̃A�[����LP�p�Ɍ��肵���x�������h�E�^�C�v��t�O�����E�^�C�v�ɕϐg����킯�ł��B1980�N������ʏ̃x�������h�E�^�C�v�̃A�[���ݒ�(Error Null Points: 66mm&121mm�ߕӁj���嗬�ɂȂ����w�i�ɂ́A���y�\�[�X�̎�̂��d�o��r�o�ł͂Ȃ����k�o�ɂȂ�������������Ǝv���܂��B
��}��2�������g�c����Phono�@Equalizer��ʂ�����ł͍���ő��ΓI�ɖ��ɂȂ�܂��̂������g���b�L���O�E�G���[���O����5�x�i�������͓�����2�x�j�����Ă����ۂɂ��̘c�����m�ł��邩�͋^��ł��B�����ȂƂ��뎄�ɂ͂킩��܂���ł����i��j�B�ȉ~�j�̎��t���덷��J���`���o�[�̃_���p�[�ɂ��Ȃ���Ȃǂ̕��������ƍ������ƂɂȂ��Ă���Ƒz�����܂��B�V�F���̂Ƃ���Ŏ��F�ł���ʂ͊p�x�łP�x�A������0.5mm�����E�ł͂Ȃ����Ǝv���܂��̂ł�����v���g���N�^�[��I�[�o�[�n���O�Q�[�W�Œ��������Ƃ���Ł��C�������x���̖��ł��B
Stevenson����PICKUP ARM DESIGN(1966)P.320�ňȉ��̂悤�ɏq�ׂĂ��܂��F
The reduction in distortion is fairly small and it may not be considered
worthwhile to modify an existing pickup arm. However, if a new arm is being
designed, values of offset angle and overhang have to be chosen, and as no extra
work is involved in using the values given here in preference to Bauer's, it
would be foolish to disregard these improved values on the grounds that the
reduction in distortion is very small. It is a step in the right direction
although two or three such steps may have to be made before the improvement is
audible.
�ʂ����Đ����g���b�L���O�p�x�덷�����Ȃ����邱�Ƃɂ��c�̉��P����������悤�ȃ��x���܂ł̐i�����ʏ�̃A�i���O���R�[�h�Đ��ɂ������ł��傤���H�@�����u�����̎��v�igolden
ears of donkey?)���������l�◇�̉��l�̈߂��^�����l�͂��̈Ⴂ������Ǝ咣���Ă��܂��B���͔������ɂ�鉹�̈Ⴂ�͔F�߂܂����A���̌����𐅕��g���b�L���O�p�x�ɋA���邱�Ƃ͂قڕs�\���Ǝv���Ă��܂��B��X�͘c�ɑ��Ă�����x�܂œ݊��Ȃ̂������Ȃ̂ł����c�̐����������Ċ��m�ł���ƃn�Y�Ǝv������ł���l�����܂��B
2009�NAES
��127�����Richard Tollerton��"Digital simulation of phonograph
tracking distortion"�̕\���Convention Paper
7924�����\���܂����B�g���b�L���O�c�݁i���2�������g�j��������PCM�������Ăǂ̒��x�܂Řc���������邩�y�c�̕~���l�z�������������ʂ́A�P�ꍇ�����iTone
Stereo)�ł�E=0.0178�iLP����6cm��2.11�x�̊p�x���ɑ���;�M�����x����peak
10cm/s�j�܂ŕ�����ꂽ���A���ۂ̉��y�i�s�A�m��l�d�t�j�ɘc���������ꍇE��0.1(�����̊p�x��11.71�x�ɑ����j�ȉ��̘c�͕��������o���Ȃ������B11.71�x�̃g���b�L���O�p�x���͉������iHTA)�ł��c�����iVTA)�ł��L���Ȓl�ŁA1963�N��Duane
H. Cooper�̒�����("Vertical
Tracking Angle Distortion in Practice" Audio, September 1963 pp.40.71)�ł�E=0.1�ɋ߂�E��0.098����������������E�Ƃ���Ă���BTollerton�͎����pCD���쐬���W�҂ɔz�肻�̗L�������m�F���悤�Ƃ������A�͂�����ۂ�������l�����̂Ƃ��닏�Ȃ������ł��B
�P����Protractor��]���̃V�F�����g���č���Ă݂܂����B��K���V�F���̃l�b�N����50mm�̂Ƃ���ŃX�R���iSquare)���g���Ē��p�Ɏ��t���������ł��i�������V�F���̒��S���ɒ�K�̒[�����킹�Ă���܂��j�B������A�[���ɂ͂߂ăX�s���h���̓�/���R�[�h�̒��S�ƃN���X����Ƃ���̖ڐ����ǂ߂O�n�_�����ǂł��܂��B���̃}�C�N��MA-505�ŃI�[�o�[�n���O15mm�ɂ����60mm��115mm�����肪�O�n�_�ɂȂ��Ă��܂����B

0�n�_�̌��Ɏ��͗]�肱������Ă��܂���B �A�[���̐v�̂Ƃ���ɐݒ�ł������̎����ł���ȏ�̒����͗]�����Ǝv���� ���B �J�[�g���b�W�ƃV�F���̎��t����2.6mm�ɒ��a2.5mm�̃l�W�Ŏ��t�����ꍇ2�x���x�����\�ł����A�ǂ̃A�[����Baerwald�̐ݒ�ɖ�����蒲��������A�[���̌����Ȃ��Ȃ��Ă��܂��܂��B �����̂Ȃ��i�s�����ȁj���ɑ���̂͋^��ł����A���R�̂�����i���ɂ���肪 ���������ɗ]�v�ȕ��S�������Ȃ������d���̃A�[���j�Ȃ玄���[���ł��܂��B �ȉ��̐}��Alignment�������V�F����ōs���A�[����SME�̂悤��Bedplate����ړ����Ē�������A�[���̔�r�ł��B�ǂ����Baerwald�^�C�v�̃A�[����:������229mm�E�I�t�Z�b�g�p24�x�E�W���I�[�o�[�n���O18�����B�����̒����͓��R�����Ӌ`�������܂��B�\�ʏ�̈Ⴂ��Arm Distance���Œ肵�ăI�[�o�[�n���O�����ς���ꍇ�͎������������I�t�Z�b�g�p���ς��̂ɑ��A�A�[���S�̂��ړ�����ꍇ�ɂ͎������ƃI�t�Z�b�g�p�͕ω����܂���B
���̐}��Groove Radius��60-146mm�ԂɌ��肵���ꍇ�ABedplate��ŃA�[�����ړ�����������ς����ɃI�[�o�[�n���O��Arm Distance�̐ݒ���ɂ��ǂ̒��x�ő�c�����ς�邩Baerwald�^�C�v�̎�����20/23.7/30cm�Ŕ�r�iArm Distance�Œ�ŃV�F����ŃI�[�o�[�n���O������Ǝ����������łȂ��I�t�Z�b�g�p���ς�邱�Ƃɒ��ӂ��������j�B�C���t�����Ƃ́F 1.��ʂɃI�[�o�[�n���O�W���l�Ɣ�r���ď��Ȃ�������ڂ̕����c���傫���Ȃ�X���ɂ���@ 2.�������̈Ⴂ�ɑ��c�݂̐�Βl�̕ω��͏��Ȃ�(�����̃|�e���V�������ݒ�̕����厖�j�B����ł́h����9inch���x�̎������̃V���[�g�A�[����12inch���x�̃����O�A�[�����������[�J�[���瓯���ɏo���̂��h�ɂ��Ă͗��j�I�ȗ��R������܂����B�܂�16inch��Transcription recordings�������ǂ�60�N�ゲ��܂Ŏg���Ă�������Professional�p�r�Œ����A�[���̎��v���������悤�ł��i16inch=���a��40cm�̊O���̍a���g���[�X�����Ƃ��ł������g���b�L���O�p�x�������Ȃ����邽�߁j�B����12inch�ȉ��̃��R�[�h�̍Đ��ɂ̓����O�A�[���̕K�v�͂Ȃ��Ȃ����̂ł����A�{���̗��j�w�i��ړI�͖Y����A�̔���́i�I����=�o���G�[�V�������������ق����q�������j���R���犵�K�I�Ƀ����O�A�[�����V���[�g�A�[���ƂƂ��ɒ��邱�Ƃ������݂���悤�ɂȂ�܂����B�����I�ȍ��ق͎����A�[�����ʂ̈Ⴂ�ɂ���A�����A�[���̓R���v���C�A���X�̒Ⴂ�Â��^�C�v�̃J�[�g���b�W���g���ꍇ�Ɍ�����悤�ł��B�Z���A�[���ł��d���V�F�����g���Γ����ɂȂ��͂��ł����AProfessional���͊Ȃ���time-honoured or vintage or novelty�Ȃǁh�قȂ���́h�Ɏ䂩���}�j�A�ɂ͕K�v�Ȃ��̂̂悤�ł��B�A�[���̒ǐ������ǂ��y���A�[���������̂��A����Ƃ��ǐ����̈�����łȏd���A�[���̕��������x�������̂��͕�����܂���B
Stevenson�^�C�v�̃��j�A�I�t�Z�b�g�����Z�߁i�I�t�Z�b�g�p�����Ȗځj�̃A�[���ł͂ǂ��Ȃ邩��r���Ă݂�ƃI�[�o�[�n���O�̕W���l����̕��Ƙc�݂͂قڍ��E�Ώ̂ł����B
�I�t�Z�b�g�p�̕W���l����̕��Ƙc�݂͈ȉ��̂悤�ɂȂ�܂��B�p�x�ƃI�[�o�n���O��(��������Arm Distance)���Ƃ��ɋ����Α�����ʂŘc�����X�Ɉ�������ꍇ������܂�(�^�ǂ����Ȃ��Ȃ�ꍇ������j�B
�X�e���I�������̌Â��Ɩ��p�A�[���̋L�q��14�D�i���ł͂Ȃ��j�Ƃ�16�D�Ƃ����̂̓C���`�P�ʂł̑S�����T�ˎ����Ă��܂��B�Â��A�[���̓J�E���^�[�E�G�C�g������r�I�����A�[���̎������ʂ����ɂȂ�Ȃ����������炩�Ȏ���ɑ������Y����܂����B�����Ă��̑S���͓K�p���郌�R�[�h�Ղ̒��a���̓^�[���e�[�u�����a�ɂقڊY������ƍl�����Ă��܂����B������9�C���`�A�[����12�C���`LP�A������12�C���`�A�[����16inch Trascription Record�ɂ��ꂼ��p�����Ă����w�i������܂��B
| Total Length | Effective Length (arm pivot to stylus) | Rear Length (arm pivot to rear end of arm) | |
| inch | mm | approx. 75% of total length | approx. 25% of total length |
| 12 | 304.8 | 229cm��9inch | 76.2 |
| 13 | 330.2 | 248 | 82.55 |
| 14 | 355.6 | 267 | 88.9 |
| 15 | 381 | 286 | 95.25 |
| 16 | 406.4 | 305��12inch | 101.6 |
���}�n�̃I�t�Z�b�g�p�̂Ȃ�Integrated Pure Straight Arm YSA-2�̉�����ɒʏ�̃I�t�Z�b�g�p�̂���YSA-1�Ƃ̘c�̔�r�}������܂����B45/45�X�e���I�a���g���[�X�����Ƃ��̘c�ɂ��ăV�~�����[�V�����v�Z�l�Ǝ����l���r���Ă��܂��B�g���b�L���O�p�x�ɂ��c�ׂ�ꍇ�A�����g���b�L���O�p�iVTA/VMA�j�ɂ��Ă͐����M�����A�����g���b�L���O�p�x���ɂ��Ă͐����M�����g���ׂ��Ȃ̂ł����A���̃e�X�g�ł͕Ѓ`�����l��(����45�x�����^���j20Hz-20kHz Sweep�e�X�g�M�����g���Ă��܂�(���炭�X�e���I�a�̎��̂���������45/45�a���g�����̂ł��傤�j�B����x�U��3.54cm/s peak(45�x�����j�𐅕������Ɛ��������ɕ�����Ƃ��ꂼ��1/��2���� 2.5cm/s peak�ɂȂ�܂��B���`�����l��Sweep�M���o���h�i�g���[�X�a���a�ŒZ��27cm�j���g�����ꍇ�F2.5cm/s�x�U���Ƃ��Đ����g���b�L���O�p�x���ɂ��v�Z���ɑ������Ƙc�͖�0.9%(-41dB)�ƂȂ�AMC-1000�̐j��̋ȗ���8micron�����Ƃ��Đ��������̃g���[�V���O�c(2���c)���ɑ�������1kHz��-51dB�A10kHz��-31dB�ƂȂ�قڐ}�ƈ�v���܂��i�E�`�����l��Sweep�M���o���h�ŒZ���a26cm�ł�:�p�x�덷�ɂ��c��1%=-40dB�A���������̃g���[�V���O�c��1kHz��-50dB�A10kHz��-30dB)�B���Ƃ��O����10�x���������Ă������g���b�L���O�p�x���ɂ��c�͉ߏ��œ��ɒB���鑼�̘c�i�g���[�V���O�c�Ȃǁj�Ɣ�ׂ�Ƃقǂ�ǖ����ł������Ƃ������Ă��܂��B�����g���b�L���O�p�x���ɂ��c�͍a�̎��g���Ƃ͊W�Ȃ��̂ɐ}���1kHz�ȉ��������Ă��闝�R�́ARIAA�^���������獂���toplift�����Ȃ����e�X�g���R�[�hTRS-1007�̐����f�������̂ł��i�������R��tracing distortion�̃V�~�����[�V�����J�[�u����摤�ŋȂ����Ă���j�B200Hz�ȉ��v�Z�l��荂���Q���c���������ꂽ�̂̓e�X�g���R�[�h���̂����^���c�̉e��������RIAA�^���̒���S/N���҂��Ȃ����ߑ��ΓI�ɘc�d�����傫���ł�̂��[�z���̈���o�܂���B�������̌��_���}�����܂�A���Ȃ�h���h�Ȑ������܂܂�Ă��ċ����[�������ł��B

TRS-1007�͊O���Ɠ����ł̃J�[�g���b�W�̎��g���������ׂ邽�߂ɓ����a�a��6.5cm�ɂ������M�����L�^����Ă��܂��B�������ł͊p�x���ɂ��g���b�L���O�c���j�̋ȗ��ɂ��g���[�V���O�c�����ɑ����邪�A�g���[�V���O�c�̑������̓g���b�L���O�p�x���ɂ��c�̔�ł͂Ȃ��B�Ⴆ��YSA-2�ł͍ŊO���ł͍ő�{�X�x�A�����ł́|10�x�̕����ł邪�A��L�̃V�~�����[�V����������(�a���a13cm�j�ɓK�p��������̂悤�ɂȂ�܂��B���̘c�J�[�u�����s�ړ����邾���ł͂Ȃ��̂����l����ƁF�g���b�L���O�p�x�덷�ɂ��c�i=v*TAN(A)/V �j�͍a�a�ɔ���Ⴗ��iV�������ɂȂ�Ɛ����g���b�L���O�c�͔{��6��B��������j�̂ɑ��A�����g���[�V���O2���c�̎�(pi*f*rs*v/V^2)������ƍa�a�ɂ���������xV�̎���ɔ���Ⴗ��̂ŁAV�������ɂȂ�Ɛ����g���[�V���O�c��4�{(12dB)�S���Ȃ闝���ł��B���������̂Ȃ������^�����m�����ł��s���`�G�t�F�N�g�ɂ�萂���Έڂ��������A�ʏ�̃X�e���I�J�[�g���b�W�Ńg���[�X����Ƃ�͂�2�������g�c���������܂��B�����������s�b�N�A�b�v���Ȃ��Â����m�����J�[�g���b�W�����m�����^���ɂ͍œK�ȗ��R�ł��傤���H�j��̋ȗ������������邱�Ƃł����m�����a�ɂ����鐂���Έڂ��y���ł��܂������S�ɖ����Ȃ�킯�ł͂���܂���B
�����g���b�L���O�덷�̓J�[�g���b�W�̕��̖��Ȃ̂��J�[�g���b�W�̍����������������B
�{�u�E�O���n���̃A�[���̃y�[�W��Whitepaper on Analog Reproduction and Tonearm Design�Ƒ肵�����̂̓A�[���̏�����_���Ă��Ėʔ��������i���ɃA���`�X�P�[�e�B���O�j�B�O���n���̃A�[�������������Ƃ͎v��Ȃ�����ꔃ����قlj�����ǂ��Ȃ����A�ߍ��̃^�[���e�[�u����A�[���͊��S���Ȃ��i15�N�ʑO�̕����܂��j�Ƃ����̂ɂ͓������܂����B�O���n�����̓A�i���O�̍Ő������I��������ɓo�ꂵ�܂������A���ł��M�S�Ɍ����𑱂��ނ�unipivot�A�[���ɉ��ǂ������Ă��܂��B�����|�C���g�A�[���̏ꍇ�A���I�ȍ��E�o�����X�������₷�����_��2�̎��ň��艻����H�v��2008�N�č�����7382713�Ă��܂��i�ȑO�̔ނ̃A�[���͂Q��lateral counter weights��unipivot�̈ʒu��艺�ɒu�����Ƃł��̖��ɑΏ����Ă��܂����j�B�hLateral stability lacking in a neutral balanced unipivot tone arm is provided by magnetic coupling between magnets on the tone arm housing assembly and a freely rotating platform�h�Əq�ׂĂ���A���`�X�P�[�g�@�\���v�[���[�E�x���g���g��������ȍ\���ł��B�ȑO���i�����ꂽ�ނ̃A�[���Ɠ��l�ɃA�[���������ɐi�ނقǃA���`�X�P�[�g�͂��傫���Ȃ�v�ł����A�o�C�A�X���̃��b�h�̉�]�p�̓v�[���[���g�����Ƃɂ��]���̍\���ɔ�ׂ�Ɩ��ɂȂ�̂Ńo�C�A�X�͂̕ω��͔�r�I���Ȃ��BGraham Phantom �Ƃ����V�V���[�Y�̃A�[�������̓��������̉��������̂��Ƃ������Ƃ��ŋߒm��܂����B�{���̃T�C�g�ł͎������ȂǂL���Ă��Ȃ��̂ŁA�A�����̗v�]�ł̃I�[�_�[���C�h�ɋ߂����i�̂悤�ł��B
�ꕔ�̃n�C�G���h�̃A�[���Ńp�C�v�̎�ނ����D�݂őI�ׂ�Ƃ����̂̓J�[�g���b�W���l���Ă̎��Ǝv�����@���Ȃ��̂��H<�F�Ⴂ������܂���>�Ɗ��߂�Ƌ�⍜�������Ⴀ��܂��ɁA�Ȃ�Ĕ�������������Ȃ�܂����A����̓C�\�b�v�́��_���ς��������̘_���E����������҂̘_����inverted snobbery�̗ނł��傤�ˁB
�P�ʂ�cs�Ƃ����P�ʂł���킳��鎖�������ł����A����͐��m�ɂ�CGS�n�̓��S�x��St(�Z���`�X�g�[�N�X�j�̂��Ƃł�(1cS����1mm2/s��0.01cm2/s�A�PSt=0.0001m2/s=1cm2/s)�B ���l���傫���قǗ���ɂ���(�������C���傫���j�B �V���R���̔S������Œ�������͓̂���炵��(�S�x�̈Ⴄ�I�C����������肪����炵���̂ł���)�B�M�z��RTV�V���i�[�͑S���ʂ̗p�r�Ŏg���Ȃ��悤�ł��B�ȑO�ɃI�C�����{�i���^�܁j�������Ă��܂������A���N��ɂ͊��������Ȃ��Ȃ��Čł܂��Ă��܂��܂����B���x�̍����V���R���I�C���͌o�N�ω����Ȃ������ł��B���֖��̐������������犣�����i�A�}�j���˖��j���������i�哤�؎���j�s������(�֖��q�}�V���I���[�u���j�̋�ʂ����邻���ł��B���S�x�̐��l�͑�������ɂ���Ă��ς��悤�ŁA20����S���Ƃ��ē��肵���T���v�����ʃ��[�g�œ��肵��50��cSt�̕����d�������肠�܂�M�p�ł�����̂ł͂Ȃ��悤�ł��BSME��FD200�p�_���s���O�I�C����20����S���Ƃ̂��Ƃł����A���݂̎w�W�ł͂��_�炩��5����St���x�̂��̂��K���Ȃ悤�ł��[FD200�̃}�j���A���ł��ό`�������R�[�h���g���[�X�����Ƃ��̕s��ɑ��ā@�P�D�I�C���̗ʂ����炷�@�Q�D�S�x�̒Ⴂ�I�C���𑫂��@�R�Dpaddle�����������̂ɑւ��铙�̑����Ă��܂��B�A�[�����t�^�[�ɂ͕���50����St���炢�̂��̂��g���Ă���悤�ł��B�NjL�FEMI��EPU 100�V�X�e���̔����҂o���������͂f�a977841�i�P�X�U�S�N�j�Ń����|���g�A�[���̐�����2������4���Z���`�X�g�[�N�X�𐄏����Ă��܂����A�ނ̃����|�C���g�A�[���͑S���Ő�������thimble���^�ł��������Ƃ��l�����Ȃ���Ȃ�Ȃ��B�]���ă_���s���O�I�C���̐����͂́@�@�S�x�A�������u�̃A�[����]������̋����B�t�Ƃ̐ڐG�ʐςɂ��ω�����̂ŁA���ꂼ��̃A�[���ɂ��ꂼ��œK�l������悤���B
�_�C�i�~�b�N�o�����X�̃A�[���͕ό`�������R�[�h���g���[�X���Ă��ǐ����\�������Ƃ����Ă��܂��B�A�[���̎x�_���Ɂ��������i�܂菉����U��q�̎����Ƃ��ĕ��́j�������A�X�^�`�b�N�̏d�͉����x�����_�C�i�~�b�N�̃o�l�ɂ������x�̕��������������Ƃ͂Ȃ��̂ŕs�v�c�ł��i�d�͂ł��o�l�ł�3g�̗͂�3g�Ȃ̂œ����n�Y�ł��j�B���g�[���A�[���̃o�����X���[���ɕۂ����܂ܐj����������̂ŁA�������[�����g���قǂ�ǂȂ��A���R�[�h�̔����ΐS�̉e�������ɏ�Ɉ��̐j����ۂ��Ƃ��ł��܂����Ƃ��������R�[�h�v���[���[�S�N�j��157-158�ł̎R�쐳�����̐����͗����ł��܂���ł����B�X�^�`�b�N�o�����X�A�[���̏d�S�͐��~�������x�_���痣��Ȃ��̂ŕ��s���̒藝�ɂ��lj����[�����g�͂킸���Őj����������Ƃ��J�E���^�[�E�F�C�g�͎x�_�ɋ߂Â��̂őS�̂̃��[�����g�̓_�C�i�~�b�N�ł��X�^�`�b�N�ł��]��ς��Ȃ��Ǝv���̂ł�(�v�Z��Q�Ɓj�B�ނ���o�l�̐������t�p���Ă���̂ł͂Ȃ����Ǝv���܂��B�܂�A�[�����Ղ̕ό`�ɂ�莝���グ����ƒ��͂����������j���������A��Ԗ��ƂȂ�Ղ�������n�߂鎞�ɂ��ǂ��ǐ��ł���̂�?�@�}�C�N��MA-505�Ńo�l���\�����j�A�Ȃ��̂Ƃ��Čv�Z����ƔՂ̍����ω��}�Q�����ɂ��j���ω��́}�\���~���O�����ɂ����Ȃ�Ȃ��̂ł����A���ۂɂ͂��������ω����傫���̂�?�@�Ղ̕ό`�ivertical
wow around 2-4Hz)�ɂ��A�[���̋����U���ł̓o�l�̔����͂͐ÓI�ɒނ荇���Ă���͂����傫���Ȃ�ƍl������i�Z���ԂɃo�l�������ꍇ�ɂ͗]�v�ɗ͂��K�v���j���ω�����������j�B�A�[���̉��~��]���V�~�����[�V�������Ă݂�ƁA���̏����͒x�����ĔՂ̕ό`�i���ɎR�z���痎�����鎞�j�ɒǐ��ł��Ȃ����ԁi�����~���Z�R���h�j���o���܂��i�_�C�i�~�b�N�ł��X�^�`�b�N�ł��j�B���̋��Ԃ̓J�[�g���b�W�̃_���p�[���������߂Ă���Ɨ\�z���܂�(�J���`���o�[����8�����O��œ������ʂ�1mg���x�̐j�^���̓A�[����[�̉^�����x�ɔ�ׂ悤���Ȃ������̂ł������̕Έڕ��Ɍ��E������̂ł�:���̌��E����ΐj��т��܂��j�B�Ȃ�Ƃ��g���[�X�͂��Ă������ςɂȂ�i�c�U���������Ȃ�j���R������ł͂Ȃ����Ǝv���Ă��܂��B1977�NLadegaard��Audible
Effects of Mechanical Resonances in Turntables�ŕ��ꂽ�j���ω��iP11�j�̓C�i�[�V���̏��Ȃ�Low
Mass Arm�̗D�ʂ������Ă��܂��B�m���Ƀ��j�A�g���b�N�̒Z���C�i�[�V���̏��Ȃ��A�[���̓_�C�i�~�b�N�E�X�^�`�b�N�ɊW�Ȃ�����̂���Ղł��悭�g���[�X���܂��B�NjL�F�_�C�i�~�b�N�o�����X�͈����o�l�𗘗p�������̂������̂ł����A�}�O�l�b�g���g�����������݂��܂����i1977�N������Lustre
GST-801)�BKenwood�̖k�������1978�N���{����(S55-48804)��\�����Ă���A�����Ɏ��̕��͂������܂����F�u�]���́A���ɊԂ̑��ݍ�p�̂P�̂݁A�܂���͂��˗͂̈���݂̂𗘗p���Đj����������Ă���B������ɁA���̕��@�͎��ɊԂ̋������ω�����ƁA�͂̑傫�����ω����Ă��܂��B<����>���Ƃ����R�[�h�Ղ̂��蕔�������ŃA�[���̏㉺�����̊p�x���ω�����ƁA�j�����ω����錇�_���������B�����āA�j���̕ω��́A���y�M���̐U���ϒ���Ђ��݂̌����ƂȂ���̂ł������B���̌��_�́A�o�l�ɂ��j����������_�C�i�~�b�N�o�����X�`�g�[���A�[���ł����݂��A��͂���������������̂ł������v�Ƃ���4�̃}�O�l�b�g�ɂ��v�b�V���v��(�˗͂ƈ��͂𗘗p)�ɂ����̐j������@���Ă��܂����i���ۂ̃��f���͔̔�����Ȃ������͗l�j�B�܂�A�_�C�i�~�b�N�o�����X�V�X�e���ł̓\���̂��郌�R�[�h�̎R���Ŏ��R�ɐj�����������j�̃_���p�[�����͂��J���ŊJ�������̂Őj��т��ɂ����X�������邪�A�����ɂ��̐j���ω��ɂ��c��(�c�����̐U���ϒ��j����B�\���ɑ���g���[�X�\�͂�D�悷�邩�A�c�݂̕�����Ƃ��邩�Ŕ��f��������܂��[���̓_�������}�Ɍ��钿�����A�[����Vestigial�̍��ł��w�E���܂����B�X�^�`�b�N�o�����X�ł��R���ł̓J�[�g���b�W�_���p�[�����k���Ȃ���A�[���������グ��̂����A���̗͂͐j�悩�猩���A�[���̃C�i�[�V��(moment
of inertia)���ΏۂȂ̂ł��[����ɑ��o�l�ɂ��_�C�i�~�b�N�o�����X�ł̓C�i�[�V�������łȂ��o�l�̐L���ɂ�钣�́imoment
of force)�����j���ɒlj������̂ŁA�\���ɂ��j���ω��̓_�C�i�~�b�N�o�����X�A�[���̕����傫�����ƂɂȂ�܂��B���݂�Denon DP-7F�̃A�[�����͎��ƃR�C���ɂ���d���_�C�i�~�b�N�^�ł����������u�����オ�������j����������v�X�����݂��܂��B�㉺1mm�ȓ��Ȃ̂Őv����Ȃ��͈͂Ƃ���Ă���悤�ł��B���̑��l������_�C�i�~�b�N�o�����X�̃A�[���̗��_�F�@���d�͂̉F���ł����R�[�h�����t�ł���[���������Ղ𗼖ʉ��t����W���[�N�{�b�N�X�ȂǂŎ��ۂɎg���Ă���]�@�A�o�l�̃u���[�L�����ɂ��A�[���̒��ˏグ���x�����ȏ�ɑ傫���Ȃ�Ȃ��i����ƃJ�[�g���b�W�_���p�[�̉ߓx�̈��k�Ƃ��_�C�i�~�b�N�o�����X�A�[���̃\���ɑ���g���[�X�͂̐��̂��j�@�B�d�͕���(�����j�ƃo�l�̃x�N�g�����Ⴄ���Ƃɂ��x�_���Q�����Ńx�A�����O�Ɉ��ڂ���̂ŏ���bearing
chatter�������ɂ����@
�����o�l�̓��I�Ȕ�Ȑ��������݂��Ȃ����ɂȂ�ƁA�e�[�[�w�_�C�i�~�b�N�A�[���͕ό`�����Ղ̃g���[�X���\�ɗD���x���ˋ�̂��̂ɂȂ�[�����Ă�������҂͋��ρE���M���Ǝw�E���Ă��܂��B�e�[�[�̍����i�������[�����g�̈Ⴂ�����͔ے肵�o�l�̓��I�Ȕ�Ȑ��������肵���j���ے肳���Ύ��͂���グ���B
����1957�N��Percy Wilson����THE GRAMOPHONE HANDBOOK(P.86)�ŃA�[���̉^���y�э��ϒ��c�ithe effects)���Ȍ��ɏq�ׂĂ��܂�(swinger�͕ΐS�ɂ��A�[���̉��^�����w���j�F"Naturally, the effects both of warped records and swingers are increased if the effective mass of the carrying arm when viewed from the stylus is considerable. There is thus a practical advantage in having not too massive an arm."�@���̂����Ⴒ���Ⴕ�������Ɣ�ׂ�ƁA�Ȃ�ƌ����ȉ���ł��傤�I
Static balance arm�ł̓J�E���^�[�E�G�C�gCW���A�[���x�_�ɋ߂Â���Ɛj�悩�猩���A�[���̎������ʂ͌y���Ȃ�B�A�[�����w�b�h�E�G�C�g�g�v(�J�[�g���b�W���܂ށj�ƃJ�E���^�[�E�G�C�g�b�v�Ƀ��f���������ꍇ�̌v�Z��B���s���̒藝 �h���h���{�l���O�Q ��]�n�̑��d�ʂl���g�v�{�b�v, Ig=HW*L^2+CW*D^2 d�̈ʒu�ő����镪(Md^2)���c�̒l�̌����iCW*D^2)�̕����傫���������ʂɂȂ�܂����B�Â��v�̃A�[���̃J�E���^�[�E�G�C�g�����~���`�������̂ɑ��V�����v�̃J�E���^�[�E�G�C�g�͒��a���傫���Z�����~���`�ɂȂ��Ă��܂��iBlack Widow/Magnepan��)�B�������������ʂ��y������H�v�ł��B�������Ȃ���������ʂ����炷���߂ɂ͌����w�b�h�V�F�����~�߂ăw�b�h�E�G�C�g�S�̂��y������̂���Ԃł��B�j���j�b�g������������integrated arm(�J�[�g���b�W���܂߂���̌^�A�[���j�ł͎������ʂ��ł����Ȃ��ł��܂��B�_�C�i�~�b�N�o�����X�A�[���̊������[�����g�͉��\�̐j���[���̏ꍇ�ɑ������܂��B
| �j�� | 0 | 1 | 2 | 3 | g |
| ������ �k | 23 | 23 | 23 | 23 | cm |
| HW | 20 | 20 | 20 | 20 | g |
| CW | 100 | 100 | 100 | 100 | g |
| CW�E�x�_�ԋ��� D | 4.6 | 4.37 | 4.14 | 3.91 | cm |
| �x�_�E�d�S�ԋ��� d | 0.00 | 0.19 | 0.38 | 0.58 | cm |
| �������[�����g�@�h | 12696 | 12494 | 12312 | 12148 | gcm^2 |
| Effective mass | 24.00 | 23.62 | 23.27 | 22.97 | g |
�W�����N�̃��j�A�g���b�L���O�E�v���[���E�V�X�e�����ŋߓ��肵�܂����B���̕����߂Ẵ��j�A�g���b�N�����Ă��������B
My personal note on lateral tracking error distortion: The most popular simulation graph is given by Mr. Elison
where corresponding distortion is indicated based on the reference velocity of modulation 10cm/s
which is much louder than normal recorded level. Moreover, tracing distortion for such high level modulation
is more than 4 times of normal lateral tracking distortion. The audiophiles are putting too much importance on subtle distinctions
and would not have the broader view. I compared theoretical rates of distortions in my
page based on velocity 5cm/s. FRANKLY SPEAKING THE MEASURED DISTORTIONS ON RECORDS CANNOT BE CLASSIFIED
AS "WHICH DISTORTION IS FROM WHICH" RESPECTIVELY. They can be shown only as accumulated harmonic and non-harmonic distortions.
I have never seen the test result indicating lateral tracking angle error only.
Yamaha's measurement of YSA-1(offset arm) &YSA-2(pure Straight Arm without offset). See that there is no essential difference between these two arms: no worse and no better in measured distortions! Hence I suppose neither the deflection of cantilever due to side thrust nor the lateral tracking angle error might be important issue actually even though every analog system sounds different each other on our hearing. IMO: The above chart is tricky. Sweep test bands of TRS1007 are recorded 45degrees L or R so that the above tracing distortion as calculated is virtually for (2nd harmonic) vertical tracing distortion since the distortion for lateral tracing distortion is mainly 3rd harmonic and rating about half of 3rd harmonic vertical tracing distortion. Though Yamaha document has not clarified this point, their equation for tracing distortion is applicable for vertical tracing distortion in my understanding. The decreasing curve of lateral tracking error distortion under 1kHz is reflecting the characteristic of usual frequency test record which is excluding top lift 75microsecond from RIAA recording characteristic.
There is a Japanese song [yosikono-a Geisha song] accompanied with Awa dance festival similar to Samba:
"If the dancers and the spectators are both fools, then it is much better to dance in their
way!"
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}